โรงไฟฟ้าพลังงานคลื่นเป็นสถานีไฟฟ้าที่ตั้งอยู่ในสภาพแวดล้อมทางธรรมชาติทางน้ำโดยมีวัตถุประสงค์เพื่อผลิตกระแสไฟฟ้าจากพลังงานจลน์ของมวลน้ำ มหาสมุทรมีพลังงานมหาศาล แต่มนุษย์เพิ่งเริ่มควบคุมมัน นี่เป็นงานที่โรงไฟฟ้าพลังคลื่นดำเนินการอย่างแน่นอน
หลักการทำงาน
หลักการทำงานของโรงไฟฟ้าพลังงานคลื่นขึ้นอยู่กับการแปลงพลังงานจลน์ของคลื่นเป็นพลังงานไฟฟ้า มีหลายวิธีในการสร้างสถานีดังกล่าว แตกต่างกันในหลักการทำงานและการออกแบบ
โรงไฟฟ้าพลังคลื่นในรัสเซีย
ในรัสเซีย เช่นเดียวกับทุกประเทศที่เข้าถึงชายฝั่งทะเล หลังจากสงบมานานหลายปี ความสนใจในแหล่งพลังงานที่สามารถฟื้นฟูได้กลับมาอีกครั้ง รวมถึงโรงไฟฟ้าพลังคลื่นด้วย
โรงไฟฟ้าแห่งแรกในประเทศของเราโดยอาศัยการแปลงพลังงานคลื่นในตัว  2557 เป็นต้นไป ตะวันออกอันไกลโพ้นใน Primorsky Krai บนคาบสมุทร Gamow นี่คือสถานีสากล มันสามารถแปลงไม่เพียงแต่พลังงานของมวลน้ำโดยตรงเท่านั้น แต่ยังรวมถึงพลังงานของการลดลงและการไหลตามธรรมชาติด้วย
2557 เป็นต้นไป ตะวันออกอันไกลโพ้นใน Primorsky Krai บนคาบสมุทร Gamow นี่คือสถานีสากล มันสามารถแปลงไม่เพียงแต่พลังงานของมวลน้ำโดยตรงเท่านั้น แต่ยังรวมถึงพลังงานของการลดลงและการไหลตามธรรมชาติด้วย
กระทรวงที่เกี่ยวข้องในประเทศของเราร่วมกับผู้นำของรัฐได้จัดทำแผนการพัฒนาพลังงานสีเขียวจนถึงปี 2563 โดยแหล่งพลังงานทดแทนจะคิดเป็นสัดส่วนมากถึง 5% ของปริมาณไฟฟ้าทั้งหมดที่ผลิตในประเทศ แผนนี้ยังจัดให้มีการพัฒนาโรงไฟฟ้าพลังงานคลื่นเพิ่มเติมอีกด้วย
โรงไฟฟ้าพลังคลื่นในโลก
โรงไฟฟ้าพลังคลื่นแห่งแรกของโลกปรากฏในปี 1985 ในประเทศนอร์เวย์ มีกำลังการผลิต 500 กิโลวัตต์
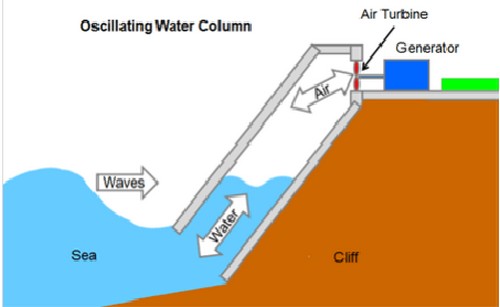
โรงไฟฟ้าอุตสาหกรรมแห่งแรกของโลกที่ใช้พลังงานคลื่นในการผลิต  พลังงานไฟฟ้าถือเป็น Oceanlinx ในออสเตรเลีย เริ่มดำเนินการในปี พ.ศ. 2548 จากนั้นได้รับการบูรณะใหม่ และในปี พ.ศ. 2552 สถานีก็เริ่มเปิดให้บริการอีกครั้ง การทำงานของสถานีจะขึ้นอยู่กับหลักการของ "เสาน้ำสั่น" กำลังติดตั้งขณะนี้อยู่ที่ 450 กิโลวัตต์
พลังงานไฟฟ้าถือเป็น Oceanlinx ในออสเตรเลีย เริ่มดำเนินการในปี พ.ศ. 2548 จากนั้นได้รับการบูรณะใหม่ และในปี พ.ศ. 2552 สถานีก็เริ่มเปิดให้บริการอีกครั้ง การทำงานของสถานีจะขึ้นอยู่กับหลักการของ "เสาน้ำสั่น" กำลังติดตั้งขณะนี้อยู่ที่ 450 กิโลวัตต์
โรงไฟฟ้าพลังคลื่นเชิงพาณิชย์แห่งแรกเริ่มดำเนินการในปี 2551 ในเมืองอากูซาดอร์ ประเทศโปรตุเกส นี่คือการติดตั้งแบบบุกเบิกที่ใช้พลังงานกลของคลื่นโดยตรง การทำงานของสถานีจะขึ้นอยู่กับหลักการ "ตัวสั่น" โครงการนี้ได้รับการพัฒนาโดยบริษัทอังกฤษ Pelamis Wave Power โดยมีกำลังไฟฟ้า 2.3 เมกะวัตต์ และสามารถเพิ่มกำลังได้ด้วยการติดตั้งส่วนเพิ่มเติม
Wave Hub ซึ่งเป็นโรงไฟฟ้าพลังงานคลื่นที่ใหญ่ที่สุดในโลก ถูกสร้างขึ้นในสหราชอาณาจักร ซึ่งตั้งอยู่นอกคาบสมุทรคอร์นวอลล์ โรงไฟฟ้ามีเครื่องกำเนิดไฟฟ้าจำนวน 4 เครื่อง ขนาดเครื่องละ 150 กิโลวัตต์ การทำงานของสถานีจะขึ้นอยู่กับหลักการ "ตัวสั่น"
เหตุใดจึงเป็นประโยชน์?
ในโลกปัจจุบัน ผู้คนมีความคิดมากขึ้นเกี่ยวกับความจำเป็นในการใช้แหล่งพลังงานหมุนเวียนในการผลิตไฟฟ้า ทางเลือกหนึ่งคือพลังงาน คลื่นทะเล. โดยคำนึงถึงข้อเท็จจริงที่ว่ามหาสมุทรโลกมีศักยภาพมหาศาล พลังงานที่สามารถให้พลังงานได้เกือบ 20% ของปริมาณการใช้พลังงานที่ต้องการ จากนั้นจึงเกิดการพัฒนา “สีเขียว”  ภาคพลังงานมีความเกี่ยวข้องอย่างมากในยุคของเรา
ภาคพลังงานมีความเกี่ยวข้องอย่างมากในยุคของเรา
สิ่งนี้สามารถอธิบายได้ด้วยเหตุผลดังต่อไปนี้:
- ทรัพยากรธรรมชาติของโลกจวนจะหมดสิ้น แหล่งพลังงานสำรองแบบดั้งเดิม ได้แก่ ถ่านหิน น้ำมัน และก๊าซ กำลังจะหมดสิ้นลง
- พลังงานนิวเคลียร์เนื่องจากอาจมีอันตรายจึงไม่ได้รับการกระจายอย่างเหมาะสม
- พลังงาน “สีเขียว” ไม่เป็นอันตรายต่อสิ่งแวดล้อมและสามารถหมุนเวียนได้
- ศักยภาพของโรงไฟฟ้าพลังคลื่นอยู่ที่ประมาณ 2.0 ล้านเมกะวัตต์ ซึ่งเทียบได้กับโรงไฟฟ้านิวเคลียร์ที่เปิดดำเนินการแล้วนับพันแห่ง
นักวิทยาศาสตร์ทั่วโลกยังคงทำงานเพื่อปรับปรุงวิธีการแปลงพลังงานของคลื่นมหาสมุทร และเหตุผลที่กล่าวข้างต้นเป็นข้อโต้แย้งที่สำคัญสำหรับการวิจัยนี้ต่อไป
ข้อดีข้อเสียของการใช้
หน่วยใด ๆ ก็ตามมีทั้งด้านบวกและด้านลบในการใช้งานเสมอและเป็นอัตราส่วนของพารามิเตอร์เหล่านี้ที่กำหนดความเป็นไปได้ในการใช้งาน โรงไฟฟ้าพลังคลื่นก็ไม่มีข้อยกเว้น มาดูข้อดีและข้อเสียของการใช้แหล่งพลังงานนี้กัน
ข้อดีของการใช้ ได้แก่ :

ข้อเสียของโรงไฟฟ้าประเภทนี้ ได้แก่ :
- พลังงานที่สร้างพลังงานต่ำ
- ลักษณะงานที่ไม่แน่นอนที่เกิดจากปรากฏการณ์บรรยากาศในสิ่งแวดล้อม
- อาจก่อให้เกิดอันตรายต่อการจราจรทางเรือและการประมงเชิงอุตสาหกรรม
“ข้อเสีย” ของการใช้งานข้างต้นกำลังค่อยๆ สูญเสียความเกี่ยวข้องไป นักวิทยาศาสตร์และนักออกแบบยังคงทำงานต่อไป การพัฒนาเครื่องกำเนิดไฟฟ้าใหม่ที่ทรงพลังยิ่งขึ้นทำให้สามารถรับพลังงานไฟฟ้าในปริมาณที่มากขึ้น โดยมีพารามิเตอร์เริ่มต้นของพลังงานหลักที่เหมือนกันซึ่งก็คือพลังงานคลื่น ปัญหาการส่งพลังงานที่ได้รับในระยะทางไกลกำลังได้รับการแก้ไข
โรงไฟฟ้าพลังน้ำแห่งแรกสร้างขึ้นในปี พ.ศ. 2456 ใกล้กับเมืองลิเวอร์พูลในดีเบย์ มีกำลังไฟฟ้าถึง 635 กิโลวัตต์
เพื่อให้โรงไฟฟ้าเดินเครื่องได้ ระดับน้ำลงและน้ำขึ้นต้องต่างกันมากกว่า 4 เมตร
เมื่อความแตกต่างของความสูงของน้ำเพิ่มขึ้น การผลิตไฟฟ้าของโรงไฟฟ้าพลังงานน้ำขึ้นน้ำลงก็จะเพิ่มขึ้น สถานที่ที่เหมาะสมที่สุดในการใช้พลังงานน้ำขึ้นน้ำลงควรถือเป็นสถานที่บนชายฝั่งทะเล ซึ่งกระแสน้ำมักจะมีแอมพลิจูด 4 ถึง 19 เมตร และภูมิประเทศชายฝั่งทำให้สามารถสร้างสระน้ำปิดขนาดใหญ่ด้วยต้นทุนที่ต่ำที่สุด
สถานที่ที่สะดวกในการสร้างโรงไฟฟ้าพลังน้ำคืออ่าวทะเลแคบ ๆ ซึ่งถูกตัดขาดจากมหาสมุทรด้วยเขื่อนระหว่างการก่อสร้างโรงไฟฟ้าพลังน้ำ กังหันไฮดรอลิกพร้อมเครื่องกำเนิดไฟฟ้าจะติดตั้งอยู่ที่ช่องเปิดของเขื่อน เครื่องกำเนิดไฟฟ้าและกังหันถูกบรรจุอยู่ในแคปซูลที่มีความคล่องตัว ข้อได้เปรียบหลักของหน่วยแคปซูลดังกล่าวคือความสามารถรอบด้าน พวกมันไม่เพียงสามารถสร้างพลังงานไฟฟ้าเมื่อน้ำทะเลเคลื่อนที่ผ่านเท่านั้น แต่ยังทำหน้าที่ของปั๊มอีกด้วย ในกรณีนี้การผลิตไฟฟ้าเกิดขึ้นทั้งในช่วงน้ำขึ้นและช่วงน้ำลง
โหมดการทำงานของโรงไฟฟ้าพลังงานน้ำขึ้นน้ำลงมักประกอบด้วยหลายรอบ สี่รอบการเปลี่ยนแปลง (ช่วงเวลา): กังหันที่ไม่ได้ใช้งาน ครั้งละ 1-2 ชั่วโมง ช่วงเวลาของการเริ่มต้นของกระแสน้ำและจุดสิ้นสุดของกระแสน้ำ จากนั้นจะมีรอบการทำงานสี่รอบนาน 4-5 ชั่วโมง ช่วงน้ำขึ้นหรือลงจะทำงานอย่างเต็มกำลัง ในช่วงน้ำขึ้น สระของโรงไฟฟ้าพลังน้ำจะเต็มไปด้วยน้ำ การเคลื่อนที่ของน้ำทำให้ล้อของยูนิตแคปซูลหมุน และโรงไฟฟ้าก็ผลิตกระแสไฟ ในช่วงน้ำลง น้ำที่ออกจากสระลงสู่มหาสมุทรจะทำให้ใบพัดหมุนเช่นกัน แต่ไปในทิศทางตรงกันข้าม ระหว่างน้ำขึ้นและน้ำลง ล้อจะหยุด โรงไฟฟ้าพลังน้ำจำเป็นต้องเชื่อมต่อกับโครงข่ายไฟฟ้า
 ในรัสเซีย สถานีน้ำขึ้นน้ำลงแห่งแรกถูกสร้างขึ้นในอ่าว Kislaya Guba ห่างจากเมือง Murmansk 90 กม. ในปี 1968 มีกำลังกังหัน 400 กิโลวัตต์ เป็นครั้งแรกที่ในระหว่างการติดตั้ง มีการใช้เทคโนโลยีการก่อสร้างแบบลอยตัว เมื่อมีการสร้างบล็อกที่ท่าเรือ จากนั้นจึงเคลื่อนย้ายโดยลอยไปยังสถานที่ติดตั้ง ติดตั้งและเทคอนกรีต ต่อมาได้ใช้เทคโนโลยีเดียวกันนี้ในการก่อสร้างเขื่อนในเซนต์ปีเตอร์สเบิร์ก ปัจจุบันมีการติดตั้งยูนิตรูปแบบใหม่ที่สถานี
ในรัสเซีย สถานีน้ำขึ้นน้ำลงแห่งแรกถูกสร้างขึ้นในอ่าว Kislaya Guba ห่างจากเมือง Murmansk 90 กม. ในปี 1968 มีกำลังกังหัน 400 กิโลวัตต์ เป็นครั้งแรกที่ในระหว่างการติดตั้ง มีการใช้เทคโนโลยีการก่อสร้างแบบลอยตัว เมื่อมีการสร้างบล็อกที่ท่าเรือ จากนั้นจึงเคลื่อนย้ายโดยลอยไปยังสถานที่ติดตั้ง ติดตั้งและเทคอนกรีต ต่อมาได้ใช้เทคโนโลยีเดียวกันนี้ในการก่อสร้างเขื่อนในเซนต์ปีเตอร์สเบิร์ก ปัจจุบันมีการติดตั้งยูนิตรูปแบบใหม่ที่สถานี
ในรัสเซีย หลังจากเสร็จสิ้นการศึกษาการออกแบบ ได้มีการระบุสถานที่หลักหลายแห่งสำหรับการวางตำแหน่งโรงไฟฟ้าพลังน้ำในทะเลเหนือที่เป็นไปได้: Mezen TPP - 8 GW, ทะเลเหนือ, ระดับน้ำประมาณ 10 เมตร; TPP ภาคเหนือ – 12 GW ทะเลเรนท์ ระดับน้ำสูงประมาณ 4 เมตร Penzhinskaya TPP – 88 GW ทะเลโอค็อตสค์ ความสูงของน้ำ 11 ม. Tugurskaya TPP – 8 GW ทะเลโอค็อตสค์ ระดับน้ำสูง 9 ม. ตำแหน่ง TPP บนแผนที่
ควรจำไว้ว่ากำลังการผลิตรวมของโรงไฟฟ้าพลังความร้อนในรัสเซียในปัจจุบันอยู่ที่ประมาณ 150 GW เนื่องจากผู้ใช้ไฟฟ้าอยู่ห่างไกล จึงกำลังพิจารณาทางเลือกในการผลิตไฮโดรเจนใกล้กับ PES และขนส่งไปยังผู้บริโภคในภายหลัง การเจรจากำลังดำเนินการกับรัสเซียเกี่ยวกับการก่อสร้างโรงไฟฟ้าระหว่างประเทศในรัสเซียตะวันออก พลังงาน PES ถูกที่สุด
สำหรับการใช้กับ PPP ในรัสเซีย ได้มีการพัฒนากังหันโรเตอร์แบบตั้งฉากที่ง่ายต่อการผลิตและมีราคาถูก ซึ่งประกอบด้วยหลายชั้นและมีประสิทธิภาพ ที่ระดับ 70...80% มีข้อได้เปรียบเหนือเครื่องจักรแนวแกนหลายประการ แม้ว่าจะมีประสิทธิภาพก็ตาม ค่อนข้างน้อย
ที่ทรงพลังที่สุดในปัจจุบันคือ Sikhvinskaya TPP ที่มีกำลังการผลิต 252 MW (เกาหลีใต้) ซึ่งเริ่มดำเนินการในปี 2556
โรงไฟฟ้าพลังคลื่น
 โรงไฟฟ้าพลังคลื่นก็ใช้เช่นกัน มีการใช้งานการออกแบบโรงไฟฟ้าพลังงานคลื่นอย่างน้อยหลายสิบครั้ง ส่วนนี้นำเสนอการออกแบบที่ค่อนข้างเป็นต้นฉบับสามแบบ
โรงไฟฟ้าพลังคลื่นก็ใช้เช่นกัน มีการใช้งานการออกแบบโรงไฟฟ้าพลังงานคลื่นอย่างน้อยหลายสิบครั้ง ส่วนนี้นำเสนอการออกแบบที่ค่อนข้างเป็นต้นฉบับสามแบบ
Oceanlinx เป็นโรงไฟฟ้าที่สารทำงานคืออากาศ อีกชื่อหนึ่งคือ Oscillating Water Column (OWC) กังหันแนวแกนที่ผลิตโดยกังหัน Denniss-Auld ตั้งอยู่ในแนวนอนในส่วนเหนือพื้นดินของแท่น ช่องที่ตั้งอยู่นั้นมีหน้าตัดที่แปรผันและกลายเป็นช่องใต้น้ำ ระดับตัวแปรของพื้นผิวคลื่นนำไปสู่การขับอากาศออกจากส่วนที่ไหลของกังหันเมื่อคลื่นเพิ่มขึ้น หรือนำไปสู่การดูดอากาศในชั้นบรรยากาศเมื่อระดับลดลงสัมพันธ์กับระดับน้ำเฉลี่ย ความเร็วลมสูงสุดในบริเวณใกล้เคียงกับใบพัดกังหัน  การไหลของอากาศแบบแปรผันตามทิศทางเหล่านี้ทำให้ล้อกังหันหมุน
การไหลของอากาศแบบแปรผันตามทิศทางเหล่านี้ทำให้ล้อกังหันหมุน  แม้จะมีการเคลื่อนที่ของอากาศในทิศทางตรงกันข้าม แต่กังหันจะหมุนเครื่องกำเนิดไฟฟ้าในทิศทางเดียว ทำได้โดยใช้กลไกหมุนใบพัดเมื่อเปลี่ยนทิศทางการเคลื่อนที่ของอากาศ การใช้คอนโทรลเลอร์จะควบคุมมุมของใบพัดที่สัมพันธ์กับแกนกังหันตามเวลาโดยขึ้นอยู่กับทิศทางของการเคลื่อนที่ของอากาศและความเร็วซึ่งในทางกลับกันก็ขึ้นอยู่กับความสูงของคลื่นบนพื้นผิวทะเล .
แม้จะมีการเคลื่อนที่ของอากาศในทิศทางตรงกันข้าม แต่กังหันจะหมุนเครื่องกำเนิดไฟฟ้าในทิศทางเดียว ทำได้โดยใช้กลไกหมุนใบพัดเมื่อเปลี่ยนทิศทางการเคลื่อนที่ของอากาศ การใช้คอนโทรลเลอร์จะควบคุมมุมของใบพัดที่สัมพันธ์กับแกนกังหันตามเวลาโดยขึ้นอยู่กับทิศทางของการเคลื่อนที่ของอากาศและความเร็วซึ่งในทางกลับกันก็ขึ้นอยู่กับความสูงของคลื่นบนพื้นผิวทะเล .  หน่วยเดียวสามารถผลิตไฟฟ้าได้ 2.5 เมกะวัตต์ โดยตั้งใจที่จะสร้างหน่วย 6 โมดูลซึ่งมีกำลังการผลิตรวม 18 เมกะวัตต์ การเคลื่อนไหวของอากาศมาพร้อมกับเสียงที่เรียกว่า “ลมหายใจมังกร”
หน่วยเดียวสามารถผลิตไฟฟ้าได้ 2.5 เมกะวัตต์ โดยตั้งใจที่จะสร้างหน่วย 6 โมดูลซึ่งมีกำลังการผลิตรวม 18 เมกะวัตต์ การเคลื่อนไหวของอากาศมาพร้อมกับเสียงที่เรียกว่า “ลมหายใจมังกร”
Searaser, Wave Energy Converter - ปั๊มคลื่นความโน้มถ่วง (ชื่ออื่นคือ "ตัวเติมทะเล", เครื่องแปลงพลังงานคลื่น) เป็นปั๊มลูกสูบแบบลอยสองทางที่สูบน้ำทะเลลงในสระ (ถัง) ซึ่งอยู่เหนือทะเล 100...200 ม. ระดับ พลังของหนึ่งโมดูลสามารถเข้าถึง 250 กิโลวัตต์ จากแอ่งน้ำตอนบน น้ำจะถูกส่งไปยังกังหันไฮดรอลิกที่ตั้งอยู่ริมฝั่งทะเลเพื่อผลิตไฟฟ้า  หลักการทำงานของปั๊มจะคล้ายกับปั๊มจักรยาน พลังขับเคลื่อนลูกสูบเป็นผลจากแรงอาร์คิมิดีสและแรงโน้มถ่วงที่กระทำต่อการลอยส่วนบนที่เคลื่อนที่ในแนวตั้งโดยมีภาระภายในเนื่องจากพลังงานของคลื่น ดูในภาษารัสเซีย และ ในความเป็นจริง การติดตั้งนี้เป็นเครื่องสะสมไฮดรอลิกที่ใช้พลังงานคลื่นเพื่อเติมถังเก็บ หอคอย หรือสระน้ำที่อยู่สูง
หลักการทำงานของปั๊มจะคล้ายกับปั๊มจักรยาน พลังขับเคลื่อนลูกสูบเป็นผลจากแรงอาร์คิมิดีสและแรงโน้มถ่วงที่กระทำต่อการลอยส่วนบนที่เคลื่อนที่ในแนวตั้งโดยมีภาระภายในเนื่องจากพลังงานของคลื่น ดูในภาษารัสเซีย และ ในความเป็นจริง การติดตั้งนี้เป็นเครื่องสะสมไฮดรอลิกที่ใช้พลังงานคลื่นเพื่อเติมถังเก็บ หอคอย หรือสระน้ำที่อยู่สูง
ไอร์แลนด์เหนือมีหน่วยใบพัดคู่ SeaGen 1.2 เมกะวัตต์ พร้อมใบพัดขนาดเส้นผ่านศูนย์กลาง 10 ม. ดูรูป 
คำนำสั้น ๆ
แนวคิดหลักในการค้นหาแหล่งพลังงานทางเลือกคือการใช้ทรัพยากรของโลกที่ธรรมชาติมอบให้ การแสวงหาผลประโยชน์ของพวกเขาก็ไม่ส่งผลกระทบแต่อย่างใด อิทธิพลเชิงลบเกี่ยวกับสิ่งแวดล้อม ดังนั้นในขณะนี้จึงมีโรงไฟฟ้าพลังงานคลื่น แสงอาทิตย์ ลม ความร้อนใต้พิภพและอื่นๆ อยู่แล้ว
โรงไฟฟ้าพลังงานคลื่นเป็นวัตถุที่อยู่ในสภาพแวดล้อมทางน้ำและใช้พลังงานคลื่น ตามมาด้วยว่าแหล่งพลังงานหมุนเวียนดังกล่าวไม่ได้ถูกสร้างขึ้นในทุกพื้นที่ ในขณะนี้มีไม่มากในโลกนี้: ในโปรตุเกส, ในสกอตแลนด์, ในฝรั่งเศส, ใน เกาหลีใต้และอื่น ๆ
ข้อดีของโรงไฟฟ้าพลังน้ำแบบคลื่น
- การขยายตัวของมหาสมุทรในโลกเป็นแหล่งพลังงานหมุนเวียน
- การแปลงพลังงานคลื่นเป็นไฟฟ้าไม่ได้มาพร้อมกับการปล่อยก๊าซคาร์บอนมอนอกไซด์ (CO) คาร์บอนไดออกไซด์ (CO2) และออกไซด์ของไนโตรเจนและกำมะถัน มลพิษจากฝุ่น และของเสียที่เป็นอันตรายอื่น ๆ และไม่ก่อให้เกิดมลพิษในดิน
- การติดตั้งและใช้งานโรงไฟฟ้าพลังน้ำแบบคลื่นนั้นมีราคาไม่แพงนัก ตราบใดที่การออกแบบโรงไฟฟ้าดังกล่าวซึ่งออกแบบให้ทนทานต่อพายุ ไม่ได้กลายเป็นเรื่องซับซ้อนทางเทคนิคจนเกินไป
- โรงไฟฟ้าพลังน้ำคลื่นขนาดใหญ่สามารถผลิตได้ เป็นจำนวนมากไฟฟ้า.
- โรงไฟฟ้าพลังน้ำแบบคลื่นที่ออกแบบอย่างเหมาะสมไม่มีผลกระทบที่เป็นอันตรายต่อพืชและสัตว์ทะเล
ข้อเสียของโรงไฟฟ้าพลังน้ำแบบคลื่น
- เมื่อพื้นผิวมหาสมุทรสงบ (สงบ) หรือเกือบจะสงบ คลื่นไฟฟ้าพลังน้ำไม่สามารถผลิตพลังงานที่เป็นประโยชน์ได้
- สถานที่ก่อสร้างสำหรับโรงไฟฟ้าพลังน้ำแบบคลื่นต้องได้รับการคัดเลือกอย่างระมัดระวังเพื่อลดผลกระทบจากเสียงรบกวน นอกจากนี้ควรตั้งอยู่ในบริเวณที่มีคลื่นลมที่มีศักยภาพเพียงพอในการผลิตกระแสไฟฟ้า
- “ พายุแห่งศตวรรษ” (พายุร้อยปี) - ชุดตัวบ่งชี้พายุ (ความเร็วลมคงที่ความสูงของคลื่น ฯลฯ ) ซึ่งเกิดขึ้นในพื้นที่ที่กำหนดทุกๆ ร้อยปีสามารถทำลายสถานีไฟฟ้าพลังน้ำแบบคลื่นได้และ ภาวะแทรกซ้อนทางเทคนิคที่มากเกินไปจะทำให้เกิดเพื่อให้สามารถทนต่อพายุดังกล่าวได้ซึ่งจะนำไปสู่ความจริงที่ว่าต้นทุนการก่อสร้างจะไม่ได้รับผลตอบแทน
- ในบางกรณี โรงไฟฟ้าพลังน้ำแบบคลื่นอาจก่อให้เกิดอันตรายต่อการนำทางได้หากไม่ได้ทำเครื่องหมายไว้บนแผนที่ เมื่อสร้างโรงไฟฟ้าพลังน้ำแบบคลื่นอาจจำเป็นต้องติดตั้งทุ่นหรือเครื่องแสดงสัญญาณอื่นๆ
แม้จะมีข้อบกพร่องที่ระบุไว้ แต่ทิศทางนี้มีแนวโน้มที่ดีจริงๆ ผู้เชี่ยวชาญกำลังพยายามปรับปรุงการออกแบบโรงไฟฟ้าพลังน้ำแบบคลื่น ทำให้มีความปลอดภัยและใช้งานได้มากขึ้น บทความนี้จะอธิบายหนึ่งในการออกแบบที่เป็นไปได้ของโรงไฟฟ้าพลังน้ำแบบคลื่นที่เสนอ บอริส วลาดีมีโรวิช ซิลเวสตรอฟ ([ป้องกันอีเมล]). คำอธิบายที่นำมาจากเว็บไซต์ http://dom-en.ru/
โครงการโรงไฟฟ้าพลังน้ำคลื่นทะเลของบริษัท Silvestrov B.V.
ที่เกี่ยวข้องกับเหตุการณ์ที่เกี่ยวข้องกับพวกเราทุกคนได้ที่ โรงไฟฟ้านิวเคลียร์ของญี่ปุ่นเห็นได้ชัดว่าอะตอมที่สงบสุขอาจทำให้เกิดปัญหามากมายเช่นกัน เป็นไปไม่ได้เลยที่จะคาดเดาทุกสิ่ง ทราบผลแล้ว. และในขณะเดียวกันก็เป็นไปไม่ได้ที่จะปฏิเสธที่จะเพิ่มความจุพลังงาน นั่นคือเหตุผลที่ฉันอยากจะแนะนำให้คุณรู้จักกับหนึ่งในวิธีที่จะได้รับพลังงานที่เป็นมิตรต่อสิ่งแวดล้อม เมื่อใช้วิธีการนี้ คุณไม่จำเป็นต้องเชี่ยวชาญเทคโนโลยีใหม่ๆ ใดๆ ทุกสิ่งที่รวบรวมด้วยวิธีนี้ได้ถูกนำไปใช้ในอุตสาหกรรมต่างๆ แล้ว เช่นเดียวกับเทคโนโลยีการซ่อมแซม การติดตั้ง และการบริการ พลังงานที่สามารถรับได้ในกรณีนี้มีมหาศาลมากจนอาจเกินกว่าแหล่งพลังงานแบบเดิมได้เป็นอย่างดี แต่ต้นทุนการผลิตไฟฟ้าอาจต่ำกว่าแบบดั้งเดิม
ลักษณะเฉพาะ โรงไฟฟ้าพลังน้ำซีเวฟ (MVHP):
- พลังของสถานีไฟฟ้าพลังน้ำที่มีคลื่นสูง 1 เมตรคือ 3600 เมกะวัตต์
- ความจุของปั๊มหนึ่งส่วน - 9.085 ลบ.ม./วินาที
- ผลผลิตรวมของส่วนสูบทั้งหมดคือ 654.12 ลบ.ม./วินาที
- ส่วนหัวสูงสุด - 326.4 ม.
- แรงดันน้ำที่ใช้งานบนใบพัดกังหันไฮดรอลิกคือ 28.64 atm
- จำนวนหน่วยไฮดรอลิกทั้งหมดคือ 12, 300 MW ต่อหน่วย
- ระยะเวลาคืนทุนสำหรับสถานีคือ 3-4 ปี
- ความสูงของคลื่นสูงสุดเพื่อให้แน่ใจว่าการทำงานของส่วนนี้คือ 12 ม.
ขอแสดงความนับถือวิศวกรเครื่องกลจาก Baku Boris Vladimirovich Silvestrov
เกี่ยวกับความต้องการแหล่งพลังงานทางเลือก
เป็นเรื่องยากที่จะจินตนาการถึงโลกสมัยใหม่ที่ปราศจากเครื่องจักรและกลไก ปราศจากที่อยู่อาศัยที่มีเครื่องทำความร้อน และไม่มีความก้าวหน้าใดๆ ให้กับมนุษยชาติมากนัก แต่ความก้าวหน้าทางเทคโนโลยีในสังคมยุคใหม่ทำให้เกิดปัญหาเฉียบพลัน - ปัญหาการเปลี่ยนแปลงสภาพภูมิอากาศบนโลกและผลที่ตามมาในอนาคตคือการตายของสิ่งมีชีวิตจำนวนมากการเปลี่ยนแปลงที่อยู่อาศัยทั้งหมดสิ่งมีชีวิตทั้งหมด
ในช่วงสองศตวรรษที่ผ่านมา การใช้เชื้อเพลิงไฮโดรคาร์บอนเพิ่มมากขึ้น หากก่อนหน้านี้ฟืน ถ่านหิน พีท น้ำมันถูกเผาเพื่อให้ความร้อนเป็นหลัก ทุกวันนี้ ไฮโดรคาร์บอนมีส่วนแบ่งมหาศาลในกระบวนการทางอุตสาหกรรม และการพัฒนาการขนส่งทางถนนและการใช้เครื่องยนต์ สันดาปภายในในการต่อเรือ การผลิตเครื่องบิน และการขนส่งทางรถไฟ ทำให้เกิดความต้องการเชื้อเพลิงไฮโดรคาร์บอนเหลวอย่างมาก นอกจากนี้โรงต้มน้ำและโรงไฟฟ้าพลังความร้อนยังเปิดดำเนินการอีกด้วย ประเภทต่างๆเชื้อเพลิงไฮโดรคาร์บอน
การเผาไหม้เชื้อเพลิงนี้ทำให้เราปล่อยก๊าซคาร์บอนไดออกไซด์หลายพันล้านลูกบาศก์เมตรและก๊าซที่เป็นอันตรายอื่นๆ ออกสู่ชั้นบรรยากาศ โดยค่อยๆ เปลี่ยนเปอร์เซ็นต์ของก๊าซในชั้นบรรยากาศ เปลี่ยนสภาพอากาศ ทำให้เกิดการเปลี่ยนแปลงต่อระบบนิเวศของโลก เวลาผ่านไปหนึ่งพันปี หนึ่งศตวรรษ หรืออาจจะหลายทศวรรษ และกระบวนการนี้จะกลายเป็นหายนะ
มนุษยชาติในปัจจุบันจำเป็นต้องมองหาแหล่งพลังงานอื่นเพื่อทดแทนเชื้อเพลิงไฮโดรคาร์บอน แน่นอนว่ายังมีพลังงานนิวเคลียร์ มีไฟฟ้าพลังน้ำ แต่แม้แต่พลังงานประเภทนี้ก็มีด้านลบและไม่สามารถแก้ไขได้ ปัญหานี้. การก่อสร้างโรงไฟฟ้าพลังน้ำเกี่ยวข้องกับการก่อสร้างเขื่อนและน้ำท่วมพื้นที่อันกว้างใหญ่ และในทางกลับกัน ขัดขวางระบบนิเวศของโลก และของเสียจากพลังงานนิวเคลียร์เป็นปัญหาเร่งด่วน วันนี้. นอกจากนี้ อุบัติเหตุในภาคพลังงานนิวเคลียร์ทำให้เราคิดถึงอันตรายที่เพิ่มขึ้นของพลังงานนิวเคลียร์
วัตถุประสงค์ของโครงการ MVGe
มีพลังงานประเภทต่างๆ เช่น พลังงานแสงอาทิตย์ ความร้อนใต้พิภพ ลม แต่ส่วนแบ่งของพลังงานประเภทนี้ในสมดุลพลังงานโดยรวมนั้นค่อนข้างเจียมเนื้อเจียมตัวมากเนื่องจากมีต้นทุนสูง เราต้องการแหล่งพลังงานใหม่ที่เป็นมิตรกับสิ่งแวดล้อม แหล่งพลังงานอย่างหนึ่งอาจเป็นไฮโดรเจน เมื่อถูกเผาไหม้ ไฮโดรเจนจะปล่อยพลังงานออกมาในปริมาณที่เพียงพอและเป็นเชื้อเพลิงที่ดีเยี่ยม การขนส่งทางรถยนต์และเครื่องยนต์สันดาปภายในทั้งหมดสามารถทำงานด้วยไฮโดรเจน โดยปล่อยเพียงไอน้ำออกสู่ชั้นบรรยากาศ ไฮโดรเจนยังสามารถใช้เพื่อให้ความร้อนแก่บ้านในห้องหม้อไอน้ำได้
ไฮโดรเจนเป็นเชื้อเพลิงที่เป็นมิตรต่อสิ่งแวดล้อมในอุดมคติ อิเล็กโทรไลซิสของน้ำเป็นกระบวนการในการรับไฮโดรเจนและออกซิเจนจากนั้นและในปริมาณที่จำเป็นในอนาคตเพื่อเผาไหม้ปริมาณก๊าซเหล่านี้ที่เกิดขึ้น แต่ทุกวันนี้ การผลิตไฮโดรเจนโดยการย่อยสลายน้ำมีราคาแพงและต้องใช้ไฟฟ้าจำนวนมาก ซึ่งโดยส่วนใหญ่แล้วจะได้มาจากการเผาไหม้ไฮโดรคาร์บอน เพื่อแก้ปัญหานี้ จึงจำเป็นต้องมีไฟฟ้าราคาถูกและเป็นมิตรกับสิ่งแวดล้อมจำนวนมาก โครงการที่เสนอสำหรับการก่อสร้างโรงไฟฟ้าพลังน้ำทางทะเลซึ่งไม่เผาไฮโดรคาร์บอน แต่เปลี่ยนพลังงานของคลื่นทะเลเป็นพลังงานไฟฟ้ามีวัตถุประสงค์เพื่อแก้ไขปัญหาที่อธิบายไว้ข้างต้น
พลังงานของคลื่นทะเลอาจกล่าวได้ว่าไม่มีขีดจำกัด และในปัจจุบัน ภารกิจของเราก็คือการเลือกและเปลี่ยนแปลงพลังงานนี้อย่างมีประสิทธิภาพสูงสุด ทำให้มันใช้งานได้และรับใช้มนุษยชาติ นี่คือสิ่งที่จะกล่าวถึงในหมายเหตุอธิบายนี้ โดยจะพิจารณาวิธีการรับพลังงานจากคลื่นทะเล การคำนวณกำลังไฟฟ้าต่อหน่วยอุปกรณ์ จะคำนวณกำลังรวมของการติดตั้งที่เลือก และการวิเคราะห์เปรียบเทียบ โดยจะดำเนินการคืนทุนในการก่อสร้างโรงไฟฟ้าที่มีกำลังไฟฟ้าใกล้เคียงกัน
การเลือกสถานที่สร้างโรงไฟฟ้าพลังน้ำนอกชายฝั่ง
สถานีไฟฟ้านอกชายฝั่งที่มีประสิทธิภาพสามารถสร้างขึ้นบนแพลตฟอร์มนอกชายฝั่งได้ เช่นเดียวกับแพลตฟอร์มการผลิตน้ำมันที่มีอยู่ สร้างขึ้นบนชายฝั่งแล้วติดตั้งในทะเลเปิด เทคโนโลยีการผลิตน้ำมันที่คล้ายกันได้รับการพัฒนามาอย่างดีแล้วและไม่มีปัญหาใด ๆ
เมื่อเลือกสถานที่สำหรับก่อสร้างโรงไฟฟ้าพลังน้ำนอกชายฝั่ง ควรมีข้อมูลทางสถิติเกี่ยวกับความกว้างของคลื่นทะเลโดยเฉลี่ยต่อปี เป็นที่ทราบกันดีว่าคลื่นทะเลสูญเสียพลังงานไปอย่างมากใกล้แนวชายฝั่ง ดังนั้นจึงแนะนำให้ติดตั้งแพลตฟอร์มดังกล่าวที่ระดับความลึก 60-80 ม. หรือที่ระดับความลึกที่ตื้นกว่า แต่ตั้งอยู่ใกล้กับภูมิประเทศด้านล่างที่ลดลงอย่างรวดเร็ว ขอแนะนำให้ติดตั้งใกล้กับชายฝั่งมากขึ้นเพื่ออำนวยความสะดวกในการขนส่งไฟฟ้าที่ผลิตได้ แม้ว่าในบางกรณีพลังงานนี้สามารถนำไปใช้โดยตรงในทะเล โดยกำจัดอุตสาหกรรมที่เป็นอันตรายให้ไกลที่สุดเท่าที่จะทำได้จากสถานที่ที่ผู้คนอาศัยอยู่หนาแน่น เป็นไปได้ที่จะสร้างการผลิตที่ใช้พลังงานสูงโดยตรงในทะเล รวมถึงบนฐานนอกชายฝั่งด้วย
ความแตกต่างระหว่าง MWGE และไฟฟ้าพลังน้ำแบบดั้งเดิม
การผลิตไฟฟ้าขึ้นอยู่กับอุปกรณ์มาตรฐาน เครื่องกำเนิดไฟฟ้าพลังน้ำแบบธรรมดา และกังหันน้ำที่ใช้ในไฟฟ้าพลังน้ำ ความแปลกใหม่คือปั๊มไฮดรอลิกลูกสูบที่ทรงพลังแปลงพลังงานคลื่นเป็นพลังงานศักย์ของน้ำ จากนั้นส่งผ่านท่อไปยังใบพัดของกังหันไฮดรอลิก ปั๊มไฮดรอลิกเหล่านี้ใช้หลักการทำงานของแรงที่มีทิศทางตามแนวเส้นทแยงมุมสองแรง ได้แก่ แรงโน้มถ่วงและแรงผลักของน้ำ ซึ่งกำหนดโดยการเคลื่อนตัวของส่วนโป๊ะของปั๊มไฮดรอลิกนี้ และยิ่งมีกองกำลังเหล่านี้มากเท่าไร โรงไฟฟ้าก็จะยิ่งมีพลังมากขึ้นเท่านั้น แรงเหล่านี้ซ้อนทับบนยอดและร่องคลื่นทะเล ทำให้เกิดการทำงานของปั๊มลูกสูบที่ทรงพลัง
เนื่องจากการออกแบบปั๊มไฮดรอลิกนี้ เนื่องจากความแข็งแกร่งและความแข็งแกร่งของตัวแพลตฟอร์มและท่อน้ำที่เชื่อมต่ออย่างแน่นหนาซึ่งเป็นพื้นฐานของลูกสูบคงที่ทำให้สามารถใช้โป๊ะที่มีการกระจัดหลายร้อยตัน เป็นไปได้ที่จะได้ผลผลิตที่สำคัญของส่วนปั๊มไฮดรอลิก และเนื่องจากความเท่าเทียมกันของแรงทั้งสองนี้ จึงเป็นไปได้ที่จะบรรลุการทำงานที่สม่ำเสมอของส่วนนี้ของปั๊มในทั้งสองทิศทาง เมื่อขึ้นสู่ยอดคลื่นและเมื่อลงมาจากมัน
ความแตกต่างจากไฟฟ้าพลังน้ำแบบดั้งเดิมคือไม่จำเป็นต้องสร้างเขื่อน กักเก็บน้ำ พื้นที่น้ำท่วม ดังนั้นจึงเปลี่ยนแปลงและทำลายระบบนิเวศของโลก ชานชาลาซึ่งเป็นที่ตั้งของโรงไฟฟ้าพลังน้ำนอกชายฝั่งนั้นใช้พื้นที่ขนาดเล็กมาก น้ำในปริมาณไม่จำกัดจะถูกนำมาจากสภาพแวดล้อมทางน้ำ จากนั้นสูบเข้าสู่กังหันไฮดรอลิกและปล่อยลงสู่ทะเล
ผลกระทบต่อระบบนิเวศต่อสิ่งแวดล้อมมีน้อยมาก พื้นที่ที่ใช้ในการนี้ กระบวนการทางเทคโนโลยีมีน้อย ผลที่ตามมาจากสถานการณ์ฉุกเฉินที่อาจเกิดขึ้นนั้นไม่มีนัยสำคัญและไม่มีใครเทียบได้กับอุบัติเหตุที่อาจเกิดขึ้นที่โรงไฟฟ้าพลังน้ำโดยสิ้นเชิง และผลลัพธ์ที่ได้ก็มีมหาศาล พลังงานนี้เหมือนกับอนุพันธ์ของพลังงานแสงอาทิตย์ที่คงอยู่ชั่วนิรันดร์ ตราบใดที่ดวงอาทิตย์ส่องแสง กระบวนการบรรยากาศจะเกิดขึ้น ลมจะพัดและกระจายคลื่นทะเล นั่นเป็นเหตุผลว่าทำไมการควบคุมพลังงานนี้จึงน่าดึงดูดมาก
กำลังของสถานีไฟฟ้าพลังน้ำแบบธรรมดาขึ้นอยู่กับพื้นที่กักเก็บน้ำและแรงดันโดยตรง ดังนั้นจึงมีข้อจำกัด แต่สถานีไฟฟ้าพลังน้ำในทะเลสามารถสร้างขึ้นได้ทุกขนาดความจุ เนื่องจากทะเลไม่ได้จำกัดแค่กำลังของสถานีไฟฟ้าพลังน้ำในทะเล ขึ้นอยู่กับขนาดของมันเท่านั้น
ข้อเสียของวิธี MVGE และวิธีการแก้ไข
ทะเลและมหาสมุทรคิดเป็นสองในสามของพื้นผิวโลก ประเทศส่วนใหญ่ในโลกเป็นมหาอำนาจทางทะเล ดังนั้นวิธีการผลิตไฟฟ้าที่เป็นมิตรต่อสิ่งแวดล้อมจึงมีความเกี่ยวข้องอย่างมากสำหรับประเทศเหล่านี้ และลดการใช้ไฮโดรคาร์บอนทั่วโลกได้อย่างมาก เหนือสิ่งอื่นใด หลายประเทศเหล่านี้ไม่มีเชื้อเพลิงไฮโดรคาร์บอนเป็นของตัวเอง และเมื่อสามารถเข้าถึงทะเลได้ จะสนใจในการก่อสร้างโรงไฟฟ้านอกชายฝั่งที่เสนอ ความเป็นมิตรต่อสิ่งแวดล้อมของการผลิตไฟฟ้าด้วยวิธีนี้ก็มีความสำคัญและน่าดึงดูดใจเมื่อคำนึงถึงความต้องการเร่งด่วนในปัจจุบัน
มีข้อเสียเปรียบที่สำคัญเพียงประการเดียวในวิธีการผลิตไฟฟ้าที่เสนอ - นี่คือช่วงเวลาที่ไม่มีคลื่นโดยสมบูรณ์หรืออีกนัยหนึ่งคือความสงบอย่างสมบูรณ์ในทะเล แต่นี่ไม่ใช่ปรากฏการณ์ที่เกิดขึ้นบ่อยและยาวนานนัก และหากมีการสร้างโรงไฟฟ้าพลังงานลมในปัจจุบัน แม้ว่าธรรมชาติของลมจะเปลี่ยนแปลงไป และนี่ถือเป็นทิศทางที่ค่อนข้างมีแนวโน้ม การก่อสร้างโรงไฟฟ้าพลังน้ำนอกชายฝั่ง จะได้รับการพิสูจน์ด้วยพลังงานที่มากขึ้นอย่างไม่มีใครเทียบและค่าไฟฟ้าที่ถูกกว่า และในอนาคตระบบพลังงานทั่วโลกที่วนเวียนอยู่ทั่วโลกจะกำจัดข้อเสียเปรียบนี้เนื่องจากความสงบพร้อมกันในทุกมุมของโลกไม่ได้เกิดขึ้นและไฮโดรเจนที่สร้างขึ้นและสะสมจะช่วยให้สามารถผลิตไฟฟ้าได้ที่สถานีระบายความร้อน ในช่วงเวลานี้
ความคล้ายคลึงของทะเล สถานีไฟฟ้าพลังน้ำแบบคลื่น
ความพยายามที่จะใช้พลังงานของคลื่นทะเลเป็นแหล่งพลังงานเกิดขึ้นมาเป็นเวลานานแล้ว มีการพัฒนาตัวแปลงคลื่นมากมาย ซึ่งบางส่วนมีการใช้งานในระดับหนึ่งหรืออย่างอื่น โครงการที่มีชื่อเสียงที่สุดคือโรงไฟฟ้าพลังน้ำแบบลอยตัว แพ Kokkerel เป็ดโยกของ Salter เสาน้ำที่หมุนได้ และเสาน้ำที่เต้นเป็นจังหวะของ Massouda
ข้อเสนอที่ใกล้เคียงที่สุดคือการประดิษฐ์ของ British Elvin Smith แนวคิดนี้มีพื้นฐานมาจากการใช้ปั๊มเพื่อสูบน้ำบนภูเขาชายฝั่งใด ๆ และในขณะที่มันสะสมอยู่ก็ใช้มันเช่นเดียวกับในโรงไฟฟ้าพลังน้ำทั่วไป ดูเหมือนว่าแนวคิดจะเหมือนกัน แต่ปั๊มต่างจากข้อเสนอนี้ตรงที่มีการออกแบบที่แตกต่างกันและเป็นรุ่นลูกลอย กล่าวคือ เป็นทุ่นทะเลที่ติดอยู่ด้านล่างหรือใช้โซ่หรือสายเคเบิล
สำหรับข้อเสนอนี้ ข้อเสนอนี้มีหลายประการ ข้อบกพร่องที่สำคัญ. การขึ้นและลงของกระแสน้ำ รวมถึงความสูงของคลื่น ทำให้ปั๊มทำงานได้อย่างถูกต้องได้ยาก และต้องใช้กลไกที่ซับซ้อนในการปรับความยาวของโซ่หรือสายเคเบิล การติดตั้งทุ่นบนพุกทำให้เกิดการลอยอย่างหลีกเลี่ยงไม่ได้ ในขณะที่การยึดทุ่นไว้กับบล็อกคอนกรีตแบบพิเศษทำให้ต้นทุนของโครงสร้างนี้เพิ่มขึ้นอย่างรวดเร็ว และต้องใช้เครนใต้น้ำและนอกชายฝั่งที่มีราคาแพงเกินสมควร และที่สำคัญที่สุด ไม่มีสายเคเบิลและโซ่ใดที่สามารถรับน้ำหนักได้หลายร้อยตัว ตันเช่นนี้เป็นไปได้ในเวอร์ชันที่เสนอ
คุณสมบัติเชิงลบที่สำคัญอีกประการหนึ่งของอะนาล็อกที่พิจารณาก็คือการรวมเครื่องสูบน้ำเข้ากับท่อส่งน้ำทั่วไปโดยใช้การเชื่อมต่อแบบยืดหยุ่นนั้นเป็นเรื่องยากมาก ไม่มีวัสดุที่ยืดหยุ่น เชื่อถือได้ ราคาไม่แพง ที่สามารถทนต่อโหลดแปรผันในระยะยาว ทั้งในแง่ของแรงกดดันและการเปลี่ยนแปลงมิติทางเรขาคณิตที่สำคัญ การทำงานของปั๊ม การบริการ ตลอดจนการซ่อมแซม แม้ว่าจะเป็นไปได้ก็ตาม เป็นเรื่องยากมากและไม่สมเหตุสมผลในเชิงเศรษฐศาสตร์ โดยทั่วไปการติดตั้งข้างต้นทั้งหมดรวมถึงรูปแบบต่างๆนั้นมีประสิทธิภาพน้อยกว่าการออกแบบที่เสนอในโครงการนี้อย่างไม่มีใครเทียบได้
แพลตฟอร์มที่เสนอในงานนี้สามารถแก้ไขปัญหาที่ยุ่งยากทั้งหมดของอะนาล็อกที่กำลังพิจารณาได้ทันที แต่สิ่งพื้นฐานที่สุดและสำคัญที่สุดคือ วิธีแก้ปัญหาที่เสนอจะส่งผลให้เกิดพลังงานจำนวนมหาศาล การออกแบบที่แข็งแกร่งของแพลตฟอร์มและน้ำหนักมหาศาลทำให้สามารถใช้ห้องลอยน้ำที่มีการกระจัดหลายสิบหรือหลายร้อยตัน ซึ่งไม่มีโซ่หรือสายเคเบิลใด ๆ ที่สามารถทนทานได้ และการติดตั้งบล็อกรองรับที่มีน้ำหนักหลายร้อยตันใต้น้ำสำหรับ อะนาล็อกที่ถือว่าเป็นวิธีแก้ปัญหาที่มีราคาแพงเกินสมควร
โครงการนี้จะพิจารณาโรงไฟฟ้าพลังน้ำนอกชายฝั่งที่มีพารามิเตอร์ทางเรขาคณิตและทางเทคนิคที่ระบุโดยเฉพาะ แม้ว่าโดยหลักการแล้วจะสามารถระบุข้อมูลเริ่มต้นได้เกือบทั้งหมด ใน โครงร่างทั่วไปมีการพิจารณาประเด็นการก่อสร้าง การดำเนินงาน การซ่อมแซมและบำรุงรักษา การคำนวณทางเศรษฐกิจโดยประมาณเพื่อพิสูจน์ความมีอยู่จริง และแน่นอนว่าการก่อสร้าง
โรงไฟฟ้าพลังน้ำนอกชายฝั่งซึ่งมีแผนภาพแสดงในรูปที่ 1 เป็นโครงสร้างหลายชั้น
รูปที่ 1. โครงการโรงไฟฟ้าพลังน้ำคลื่นนอกชายฝั่ง
การออกแบบนี้มีพื้นฐานมาจากฐานรองรับทางทะเล 1 แม้ว่าทางเลือกต่างๆ จะเป็นไปได้เช่นกันเมื่อกังหันไฮดรอลิกและเครื่องกำเนิดไฮโดรเจนสามารถตั้งอยู่บนฐานที่แยกจากกัน ซึ่งจะช่วยลดความสูงของน้ำที่เพิ่มขึ้นไปยังหน่วยไฮดรอลิก และด้วยเหตุนี้จึงเพิ่มแรงดันน้ำบน ใบพัดกังหันไฮดรอลิก 3 - 4 atm
- 2- ท่อปล่อยน้ำหลังจากทำงานในกังหันไฮดรอลิก
- กังหัน 3 ไฮดรอลิก
- เครื่องกำเนิดไฮโดรเจน 4 ตัว
- สายไฟฟ้าแรงสูง 5 สายสำหรับขนส่งกระแสไฟฟ้าที่ผลิตได้
- 6- หม้อแปลงไฟฟ้า
- 7 - ลานจอดเฮลิคอปเตอร์
- 8- สถานที่ในครัวเรือน.
- 9- RU "สวิตช์เกียร์"
- 10 - สายเคเบิลสำหรับส่งกระแสไฟฟ้าที่ผลิตจากเครื่องกำเนิดไฟฟ้าไปยังสวิตช์เกียร์
- ช่องเครื่องกำเนิดไฟฟ้า 11 ช่อง
- ช่องกังหัน 12 ช่อง
- 13 - คอลัมน์ค่าตอบแทน
- ท่อน้ำ 14 เส้น
- ช่องใส่ปั๊ม 15 ช่อง
- 16 - ลูกสูบคงที่ของส่วนปั๊ม
- ส่วน 17 ปั๊ม
- 18- กรงนำทาง.
หลักการทำงานของการติดตั้งมีดังต่อไปนี้: ปั๊มส่วนที่ 17 พร้อมด้วยคลื่นจะเลื่อนขึ้นและลงภายในกรงนำ 18 รูปที่. หมายเลข 1 ครอบคลุมลูกสูบที่อยู่กับที่ 9 แสดงในรูปอื่น - ในรูปที่ หมายเลข 4 (การทำงานของส่วนปั๊มจะอธิบายแยกกันด้านล่าง) น้ำภายใต้ความกดดันผ่านท่อน้ำ 14 จะถูกส่งไปยังคอลัมน์ชดเชย 13 จากจุดที่เข้าสู่ใบพัดของกังหันไฮดรอลิก 3 กังหันไฮดรอลิกเชื่อมต่อด้วยเพลาเดียวกับเครื่องเติมไฮโดรเจน 4 ซึ่งเป็นโรเตอร์ซึ่งเมื่อหมุน ,ผลิตไฟฟ้า. น้ำเสียจะถูกระบายกลับลงสู่ทะเลผ่านท่อส่งน้ำที่ 2 ไฟฟ้าที่ผลิตได้จะถูกส่งผ่านสายส่ง 10 ไปยังสวิตช์เกียร์ 9 จากนั้นไปยังหม้อแปลง 6 จากนั้นผ่านสายไฟฟ้าแรงสูง 5 พร้อมที่จะส่งไปยังสถานีย่อยที่ใกล้กับผู้บริโภคมากที่สุด
แผนโรงไฟฟ้าพลังน้ำคลื่นนอกชายฝั่ง
ในกรณีของเรา จะพิจารณาตัวเลือกแบบหลายชั้น ขนาดของชิ้นส่วนพื้นผิวที่กำหนดโดยขนาด L * S จะถูกเลือกให้มีค่าประมาณเท่ากับ 130x130 ม. ดูรูปที่ 1 ลำดับที่ 2. ชั้นล่างเป็นห้องปั๊ม นี่เป็นส่วนหนึ่งของโครงการที่จะได้รับการพิจารณาในรายละเอียดมากที่สุด เนื่องจากนี่คือนวัตกรรมที่นำเสนอในด้านวิศวกรรมไฟฟ้าพลังน้ำ

ข้าว. 2. แผนผังห้องปั๊ม

ข้าว. 3.ส่วนหน้าห้องปั๊ม
ชั้นนี้ตั้งอยู่ที่ความสูง 12 ม. จากผิวน้ำทะเลและประกอบด้วยห้องโถงอิสระ 3 ห้องที่มีขนาด L1 * S ยาวประมาณ 130 ม. และกว้าง 40 ม. ความสูงของห้องสูบน้ำคือ 30 ม. ระหว่างแต่ละห้องโถงสองแห่งที่นั่น เป็นพื้นที่ขนาด 4 เมตร ตามภาพขนาด L2 ออกแบบให้รองรับท่อส่งน้ำที่ส่งน้ำไปยังชั้นบน แต่ละห้องโถงมีเครนเหนือศีรษะซึ่งมีความสามารถในการยกได้ 250-300 ตัน
นอกจากนี้ในชั้นล่างของแต่ละห้องโถงที่ด้านท้ายมีช่องเปิด A * B ในโครงการที่พิจารณาขนาดเหล่านี้คือ 25 ม. x 16 ม. มีรั้วกั้นด้วยราวจับและให้บริการสำหรับจอดเรือและความเป็นไปได้ในการให้บริการด้วย เครนเหนือศีรษะ ในแต่ละห้องสูบน้ำจะมีส่วนสูบน้ำ 12 ส่วนทั้งสองด้าน จำนวนส่วนสูบน้ำใน 3 ห้องโถงรวม 72 ชิ้น ดูรูปที่ ลำดับที่ 2 ซึ่งเป็นแผนผังห้องสูบน้ำ เครนเหนือศีรษะช่วยให้สามารถติดตั้งและรื้อส่วนสูบน้ำและท่อส่งน้ำที่เชื่อมต่ออยู่ได้ทั้งระหว่างการติดตั้งและระหว่างการบริการและการซ่อมแซม นอกจากนี้ยังใช้ในการบริการเรือที่จอดอยู่ ท่อส่งน้ำในส่วนที่อยู่ติดกับผนังด้านนอกของโครงสร้างจะตั้งอยู่ตามแนวผนังด้านนอกของโครงสร้างนี้
บนชั้นสองของสถานีมีห้องโถงกังหันไฮดรอลิกซึ่งติดตั้งเครนเหนือศีรษะและแท่นซ่อมด้วย ก่อนเข้าสู่กังหันไฮดรอลิกจะมีการวางตัวชดเชยไว้บนท่อส่งน้ำซึ่งเป็นอ่างเก็บน้ำที่มีเส้นผ่านศูนย์กลาง 5-6 ม. และสูง 10-12 ม. โดยทางน้ำเข้าและทางออกจะอยู่ที่ส่วนล่างของ อ่างเก็บน้ำ. ตัวอุปกรณ์นั้นเป็นถังเก็บแรงดันสูง เติมอากาศบางส่วน เติมน้ำบางส่วน ติดตั้งวาล์วกันกลับที่ทางเข้าและทางออก และออกแบบมาเพื่อให้ลักษณะการจ่ายน้ำเป็นจังหวะราบรื่นขึ้น
บนชั้นที่สามมีห้องโถงสร้างพลังน้ำหรือห้องโถงหลายห้องซึ่งมีเครนเหนือศีรษะด้วย
บนชั้นที่สี่จะมีแท่นหม้อแปลงและห้องพร้อมสวิตช์เกียร์
และสุดท้ายบนชั้นที่ 5 ก็มีห้องเอนกประสงค์และร้านซ่อม
ที่จุดสูงสุดจะมีลานจอดเฮลิคอปเตอร์
การออกแบบส่วนสูบน้ำโป๊ะ
มาดูการออกแบบตัวปั๊มกันดีกว่า โป๊ะส่วนสูบน้ำคือ รูปทรงเรขาคณิตที่ฐานเป็นสี่เหลี่ยมจัตุรัสที่มีด้าน F1 ในกรณีของเราเท่ากับ 7.5 ม. * 7.5 ม. และความสูง N1 ในเวอร์ชันนี้ ความสูงนี้คือ 13 ม. ที่ด้านบนของโป๊ะนี้มีส่วนขยายที่มีส่วน F ซึ่งมีขนาด 8.5 ม. * 8.5 ม. และสูง 2 ม. ดูรูปที่ 4 และรูปที่ 4a:

ข้าว. 4. หลักการทำงานของโรงไฟฟ้าพลังน้ำคลื่นทะเล
ในรูปที่ 4:
- 1- ท่อน้ำซึ่งเป็นจุดยืนของลูกสูบที่อยู่นิ่ง
- แขนแยก 2 ส่วน
- 3- แหวนซีลยาง
- 4- แหวนซีลยาง
- 5- วาล์วสำหรับรับน้ำทะเลจากห้อง "A"
- 6- วาล์วน้ำท่วมสำหรับคลื่นขนาดใหญ่
- 7- ลูกกลิ้งรองรับ
- วาล์วระบาย 8 ช่องของห้อง "A"
- 9- ซีลยาง
- วาล์วระบาย 10 ช่องของห้อง "B"
- 11 - ช่องภายในของส่วนปั๊ม
- 12- วาล์วสำหรับทางเข้าน้ำทะเลของห้อง "B"

ข้าว. 4ก. แผนภาพขวางของโป๊ะ
ความสูงรวมของโป๊ะดังแสดงในรูป หมายเลข 4a N ในโครงการนี้เลือกเป็น 15 ม. ส่วนโป๊ะทำจากเหล็กต่อเรือที่มีความหนา 15 มม. ภายในโป๊ะมีห้องทรงกระบอกสี่ห้องที่มีเส้นผ่านศูนย์กลาง D (ห้องละ 3 ม.) และความสูง N1 (13 ม.) เชื่อมต่อกับตัวถังด้านนอกโดยการทำให้ซี่โครงแข็ง ดูรูปที่ 4a
รองรับการออกแบบลูกกลิ้งและกรงนำทาง
ที่ด้านนอกของโป๊ะจะมีลูกกลิ้งรองรับหลายแถวในแต่ละด้านและมีความสูงหลายแถว การออกแบบโดยประมาณของลูกกลิ้งรองรับจะแสดงในรูปที่ 1 ลำดับที่ 5.

รูปที่ 5 การออกแบบลูกกลิ้งรองรับ
ในโครงการที่อยู่ระหว่างการพิจารณา ขนาดของลูกกลิ้งรองรับคือ L=650, S=250, R=500, V=300, H=550 ลูกกลิ้งเหล่านี้ทำหน้าที่จำกัดการเคลื่อนที่ของส่วนปั๊มในอวกาศ และอนุญาตให้เคลื่อนที่ในแนวตั้งเท่านั้น พื้นผิวยางรองรับของลูกกลิ้งเคลื่อนที่ไปตาม พื้นผิวด้านในช่องหมายเลข 40 ซึ่งใช้สร้างกรงนำทางดูรูปที่ 6 และรูปที่ 7 ในโครงการที่อยู่ระหว่างการพิจารณา ขนาดของกรงคือ H=20,000 มม. W=10,000 มม. L=7500 มม. S=8386 มม. ดูรูปที่ 6


ในส่วนบนของโป๊ะ ที่ระดับ 13 ม. ในส่วนด้านในและที่ระดับ 15 ม. ในส่วนด้านนอก มีฝาปิดที่ถอดออกได้ซึ่งช่วยให้ปิดผนึกช่องภายในของโป๊ะได้ ฝาครอบเหล่านี้ครอบคลุม ท่อคงที่ของท่อน้ำและในระหว่างการดำเนินการพร้อมกับส่วนให้เคลื่อนไปตามท่อน้ำที่อยู่นิ่ง ดูภาพประกอบ ลำดับที่ 4.
ในส่วนล่างของโป๊ะใกล้กับด้านล่างสุดรวมถึงส่วนบนที่ระดับ 13 ม. ตามแนวเส้นรอบวงทั้งหมดจะมีวาล์วทางเข้าน้ำทะเล ที่ด้านล่างของส่วนบนส่วนที่ขยายของโป๊ะมีวาล์วฉุกเฉินที่ออกแบบมาสำหรับน้ำท่วมฉุกเฉินของโป๊ะดูรูปที่ 4 ในกรณีที่มีแอมพลิจูดของคลื่นขนาดใหญ่เกินไป ในกรณีนี้ โป๊ะจะถูกเติมน้ำจนหมดแรงลอยตัวและแขวนในตำแหน่งที่จมอยู่ใต้น้ำบนตะแกรงนำทาง เมื่อความกว้างของคลื่นกลับสู่ค่าพารามิเตอร์ที่คำนวณได้ น้ำจะถูกบีบออกจากโป๊ะโดยใช้อากาศอัด และจะกลับสู่สภาพการทำงาน ท่อแรงดันสูงแบบยืดหยุ่นเชื่อมต่อกับโป๊ะและคงอยู่เช่นนั้นเมื่อโป๊ะอยู่ในตำแหน่งทำงาน
ดังที่ได้กล่าวไปแล้ว โป๊ะจะเคลื่อนที่ภายในตารางนำทางที่แสดงในรูปที่ 6 และรูปที่ 7 โครงตาข่ายเป็นกรงธรรมดาที่เชื่อมจากช่องทางอันทรงพลังและเชื่อมเข้ากับก้นฐานทะเล ขัดแตะถูกสร้างขึ้นบนชายฝั่งพร้อมกับแท่นและเพื่อความแข็งแกร่งยิ่งขึ้นแถวที่อยู่แต่ละด้านแสดงถึงทั้งหมดเดียว เซลล์หน้าตัดทั้งหมดของแต่ละแถวเชื่อมต่อกันและติดอยู่ที่ด้านล่างของชั้นล่างของส่วนเหนือน้ำของฐานทะเล ส่วนหนึ่งของตารางนำทางอยู่ในอากาศ ใต้ชั้นล่าง และส่วนหนึ่งอยู่ใต้น้ำ ตามขอบของพื้นผิวด้านข้างของส่วนที่อยู่เหนือน้ำของตารางนำทางจะมีแท่นสังเกตการณ์ซึ่งมีราวจับและมีบันไดออกไปชั้นบน
การออกแบบส่วนปั๊มและบล็อกท่อส่งน้ำ
ที่ตำแหน่งของแต่ละส่วนสูบน้ำ ท่อน้ำสี่เส้นได้รับการแก้ไขอย่างแน่นหนาโดยใช้การเชื่อมต่อแบบสลักเกลียว รวมกันเป็นบล็อกเดียว ดูรูปที่ 8

ข้าว. 8.ท่อน้ำในบล็อกเดียว
ตามรูปนี้ N=18500 มม. M=9500 มม. F=4000 มม. ในทางกลับกัน ท่อส่งน้ำนี้เป็นลูกสูบที่อยู่นิ่งและติดตั้งไว้ภายในส่วนปั๊ม และในส่วนบนของส่วนปั๊มจะถูกปิดและปิดผนึกด้วยฝาครอบที่ถอดออกได้ ดูภาพประกอบ ลำดับที่ 4.
ท่อส่งน้ำแต่ละท่อเป็นท่อแรงดันสูงที่มีเส้นผ่านศูนย์กลาง 0.8 ม. ท่อท่อน้ำที่มีผนังหนาช่วยให้ทนทานต่อภาระที่เปลี่ยนแปลงได้อย่างมีนัยสำคัญและทำงานเป็นเวลานานในโหมดการบีบอัดและแรงตึงสลับกัน ที่ด้านล่างของท่อส่งน้ำแต่ละท่อจะมีความหนาเส้นผ่านศูนย์กลางประมาณ 3 ม. นี่คือลูกสูบที่อยู่นิ่งซึ่งมีวาล์วทางเข้าและทางออกและบนพื้นผิวด้านข้างมีร่องปิดผนึกที่เต็มไปด้วยยางกลมหนาแน่น ในระหว่างการใช้งาน ยางซีลนี้จะถูกกดเพิ่มเติมด้วยแรงดันน้ำ

ข้าว. ลำดับที่ 9. การออกแบบส่วนสูบน้ำ
- 1- ท่อน้ำ
- ส่วนปั๊ม 2 สูบ
- วาล์วระบาย 3 ช่องของห้อง “A”
- 4- ซีลยาง
- 5 - วาล์วระบายของห้อง "B"
แน่นอนว่าเป็นไปไม่ได้ที่จะบรรลุการปิดผนึกอย่างสมบูรณ์ในห้องทำงาน และไม่จำเป็น การรั่วไหลเล็กน้อยสามารถละเลยได้ การรั่วไหลจากห้อง "B" ทำได้ผ่านทางซีลเข้าไปในห้อง "A" เท่านั้น และน้ำรั่ว จากห้องอัดด้านบน “A” เล็กน้อย จะไหลกลับเข้าอ่างเก็บน้ำ โครงสร้างส่วนใหญ่ที่อธิบายไว้ข้างต้นจุ่มอยู่ในน้ำ ฉันจะจองทันทีว่าการออกแบบส่วนปั๊มนี้ดำเนินการโดยพลการเพียงเพื่อพิสูจน์ความมีชีวิตของแนวคิดนี้เท่านั้นฉันไม่ปฏิเสธว่าอาจมีมากกว่านั้น โซลูชั่นที่ดีที่สุดของการออกแบบนี้
การคำนวณประสิทธิภาพและกำลัง
การคำนวณการทำงานของส่วนสูบน้ำ
เนื่องจากพลังงานและงานเป็นแนวคิดเดียวและใช้งานได้ ในกรณีนี้นี่คือผลคูณของแรงและการกระจัดดังนั้นจึงจำเป็นเพื่อให้แน่ใจว่าการลอยตัวของส่วนและน้ำหนักรวมเท่ากัน แรงเหล่านี้จะเป็นตัวกำหนดประสิทธิภาพของส่วนนั้น
ลองคำนวณปริมาตรของส่วนหนึ่งเพื่อให้แน่ใจว่าการลอยตัวของส่วนนี้
ปริมาตรของหนึ่งส่วนเท่ากับ:
Qns = A * B * N = 7.5 * 7.5 * 13 = 731.25 ลบ.ม.
ปริมาตรของส่วนบนของส่วนปั๊มเท่ากับ:
Qvchns = – [1 * 0.5 * 8] * 2 = 136.5 ลบ.ม.
ดังนั้นปริมาตรรวมของส่วนปั๊มโดยไม่หักปริมาตรของกระบอกสูบทำงานทั้งสี่จะเท่ากับ:
Qns = 731.25 ลบ.ม. + 136.5 ลบ.ม. = 867.75 ลบ.ม.
ปริมาตรของกระบอกสูบทำงานสี่กระบอกมีค่าเท่ากับ:
Qрц = πr²h * 4 = 3.14 * 1.5² * 13 * 4 = 367.38 ลบ.ม.
ดังนั้นปริมาตรที่ให้การลอยตัวของส่วนการทำงานจึงเท่ากับ: คิวพีแอล = 867.75 ลบ.ม. - 367.38 ลบ.ม. = 499.88 ลบ.ม.
ลองคำนวณน้ำหนักของโครงสร้างทั้งหมดของส่วนปั๊มซึ่งเราคำนวณปริมาตรของโลหะที่ใช้ทำส่วนนี้โดยพิจารณาว่าส่วนปั๊มส่วนใหญ่ทำจากโลหะแผ่นหนา 15 มม.
คิว = 7.5 * 7.5 * 0.015 + 7.5 * 4 * 13 * 0.015 + [ 8.5 + 2] * 4 * 2 * 0.015 + [ 8.5 * 8.5 -0.5 * 1 * 8] * 0.015 * 2 + 2*3.14 * 1.5 * 13 * 4 * 0.015 = 0.844 + 5.85 + 1.26 + 0.097 + 7.347 = 15.398 ลบ.ม.
ดังนั้น เมื่อพิจารณาถึงตัวทำให้แข็ง ลูกกลิ้งด้านข้าง วาล์วไอดีของน้ำทะเล เราจะใช้ปริมาตรรวมของโลหะประมาณ 20 m³ โดยคำนึงถึงความถ่วงจำเพาะของเหล็กคือ 7.8 t/m³ จากนั้นน้ำหนักรวมของ ส่วนปั๊มหนึ่งส่วนจะอยู่ที่ประมาณ 156 ตัน หากต้องการหาความเท่าเทียมกันระหว่างการลอยตัวและน้ำหนัก ให้เติมน้ำบางส่วนลงในส่วนปั๊มจนกว่าแรงเหล่านี้จะเท่ากัน
: 2 = 327.94 ตัน
ดังนั้นในการคำนวณเพิ่มเติมเราจะใช้แรงที่ส่วนสูบน้ำจะทำงานทั้งเมื่อขึ้นสู่ยอดคลื่นและเมื่อลงมาจากคลื่นเท่ากับ 327.94 ตัน ในแง่โค้งมน - 328ต
การคำนวณผลผลิตและกำลังของโรงไฟฟ้าสูบน้ำ
ทีนี้ลองพิจารณาการทำงานของกระบอกสูบทำงานแยกต่างหากของส่วนปั๊มที่แสดงในรูปที่ 4 ในรูปนี้ ส่วนปั๊มจะเลื่อนขึ้นตามคลื่นดังที่แสดงโดยลูกศร หลักการทำงานของปั๊มนี้มีดังนี้: เมื่อขยับขึ้นส่วนปั๊มนี้จะสะสมพลังงานศักย์บนคลื่น ห้อง “A” จะเพิ่มปริมาตรและเติมน้ำผ่านวาล์วน้ำทะเล 5 รูปที่. ลำดับที่ 4. ในขณะที่ส่วนทั้งหมดพร้อมกับคลื่นเริ่มเคลื่อนตัวลงมาในห้อง “A” แรงดันจะถูกสร้างขึ้น วาล์วไอดีน้ำทะเลหมายเลข 5 จะปิด และวาล์วระบายหมายเลข 8 จะเปิดขึ้น และปริมาตรน้ำในห้อง "A" จะถูกบีบลงในท่อน้ำ ในกรณีนี้ กระบวนการย้อนกลับจะเกิดขึ้นในห้อง “B” ผ่านวาล์วน้ำทะเลเปิดหมายเลข 12 ห้อง "B" เต็มไปด้วยน้ำ วาล์วระบายหมายเลข 10 ของห้อง "B" ปิดอยู่ เมื่อคลื่นขึ้นถึงยอด วงจรการอัดและการดันน้ำเข้าไปในท่อส่งน้ำผ่านวาล์วหมายเลข 10 จะเกิดขึ้นในห้อง "B" เป็นต้น
รูปที่ 9 แสดงภาพระยะใกล้ของชุดลูกสูบ โดยที่ 1 คือท่อส่งน้ำซึ่งมีการจ่ายน้ำไปยังชั้นบน ซึ่งเป็นที่ตั้งของช่องกังหันไฮดรอลิก ในเวลาเดียวกัน ท่อเดียวกันนี้ทำหน้าที่เป็นส่วนรองรับที่แข็งแกร่งสำหรับระบบลูกสูบ เนื่องจากมีท่อส่งน้ำสี่ท่อในบล็อกเดียวในส่วนสูบน้ำ แต่ละท่อจึงรับภาระสลับกัน ทั้งในด้านแรงอัดและแรงดึง ประมาณ 82 ตัน [328 ตัน: 4 = 82 ตัน]
- 2 — กระบอกสูบของส่วนปั๊ม
- 3 - วาล์วปล่อยห้อง "A"
- ซีลลูกสูบ 4 อันทำจากยางแข็งเช่นที่ใช้ในตลับลูกปืนบนเครื่องเติมไฮโดรเจน นอกจากนี้ วงแหวนยางเหล่านี้ยังถูกกดอย่างต่อเนื่องด้วยแรงดันน้ำภายในลูกสูบ
- 5 - วาล์วปล่อยห้อง "B"
ในรูปที่ 9 ส่วนการสูบจะเคลื่อนขึ้นตามคลื่นดังลูกศรแสดง ขณะที่วาล์วหมายเลข 3 จะปิด และวาล์วหมายเลข 5 จะเปิด และปริมาตรน้ำจากห้อง “B” จะเป็น ถูกบีบลงในท่อน้ำ
มาทำการคำนวณเพื่อตัดสินประสิทธิภาพของส่วนการสูบน้ำนี้กัน ดังนั้น เมื่อมีคลื่นสูง 1 เมตร ร่างกายจะลอยสูงขึ้น 0.5 เมตร แล้วตกลงไปต่ำกว่าระดับน้ำสงบ 0.5 เมตร เนื่องจากแรงดันต้านจะถูกสร้างขึ้นในท่อน้ำ ระยะชักของลูกสูบจึงเล็กลงเล็กน้อย ให้เราเลือกความสูงของคลื่นตามเงื่อนไขซึ่งระยะชักรวมของลูกสูบจะเท่ากับ 1 เมตร จากนั้นปริมาตรของน้ำที่ย้ายเข้าไปในท่อในรอบหนึ่งจากห้อง "A" จะเท่ากับ (ดูรูปที่ 9):
วา = ∏r1²h – Pr²2h
โดยที่: r1 – รัศมีของกระบอกสูบส่วนปั๊ม 1.5 ม
r2 - รัศมีของท่อเท่ากับ 0.4 ม.
h – ความสูงของคลื่นเท่ากับ 1 เมตร
วา = 3.14*1.5²*1 -3.14*0.4²*1 =7.065-0.5024=6.5626 ลบ.ม.
จากนั้นปริมาตรของน้ำที่ถูกแทนที่เข้าไปในท่อจากห้อง "B" จะเท่ากับ:
Vв= ∏r1²h = 7.065 ลบ.ม
ปริมาตรน้ำทั้งหมดในห้อง “A” และห้อง “B” สำหรับหนึ่งรอบเท่ากับ:
Vs = Va + Vв = 6.5626+7.065=13.6276 ลบ.ม.
เนื่องจากมีสี่กระบอกสูบในส่วนปั๊มเดียว ปริมาตรรวมจะเท่ากับ:
Vns = กับ * 4 = 13.6276 * 4 =54.5104 ลบ.ม.
ความถี่ของคลื่นทะเลคือ 5-6 วินาที ลองหาช่วงเวลาระหว่างคลื่นเป็น 6 วินาที จากนั้นประสิทธิภาพของหนึ่งส่วนต่อวินาทีจะเท่ากับ:
Qns= 54.5104:6 =9.085 ลบ.ม./วินาที
จากนั้นผลผลิตรวมของส่วนการสูบน้ำ 72 ส่วนจะเท่ากับ:
ΣQns=9.085 ลบ.ม./วินาที * 72 =654.12 ลบ.ม./วินาที
จากการคำนวณข้างต้นแสดงให้เห็นว่าความดันในแต่ละกระบอกสูบทั้งเมื่อขึ้นและลงพร้อมกับคลื่นมีค่าเท่ากับ 82 ตัน เนื่องจากทุก ๆ สองกระบอกสูบสามารถเข้าถึงท่อเดี่ยวที่มีเส้นผ่านศูนย์กลาง 0.8 ม. ความดันในท่อส่งน้ำจะเท่ากับ 164 ตัน พื้นที่หน้าตัดของท่อส่งน้ำเท่ากับ:
S = ∏r² = 3.14 * 0.4² = 0.5024 ตรม. = 5024 ซม.²
ความกดดันจึงตกอยู่กับทุกคน ตารางเซนติเมตรจะเท่ากับ:
164000 กก.: 5024 ซม.² = 32.64 ตู้เอทีเอ็ม
หากเราคำนึงว่ากังหันไฮดรอลิกตั้งอยู่บนชั้นสองที่ความสูงประมาณ 40 เมตรจากระดับอ่างเก็บน้ำ ดังนั้น แรงดันที่สูญเสียเนื่องจากการขึ้นของน้ำจะอยู่ที่ 4 atm ดังนั้นน้ำจึงไปถึงระดับ ใบพัดกังหันไฮดรอลิกที่ความดัน 28.64 atm แต่แตกต่างจากโครงสร้างไฮดรอลิกที่แรงดันน้ำบนใบพัดกังหันไฮดรอลิกถูกกำหนดโดยความสูงของเขื่อน ในกรณีที่พิจารณาปั๊มลูกสูบก็ทำหน้าที่เป็นเครื่องอัดไฮดรอลิกเช่นกัน กล่าวอีกนัยหนึ่งเมื่อเส้นผ่านศูนย์กลางหน้าตัดของท่อส่งน้ำลดลง ความดันภายในก็จะเพิ่มขึ้น และสามารถใช้เมื่อเลือกแรงดันที่ต้องการ มีสูตรคำนวณกำลังที่เป็นไปได้ซึ่งเท่ากับ:
กำลัง [kW] = ความดัน [m] * การไหลของน้ำ [t/วินาที] * ความเร่งด้วยแรงโน้มถ่วง [9.81 m/sec²] * ประสิทธิภาพ [0.6]
ดังนั้น กำลังไฟฟ้าโดยประมาณที่คลื่น 1 เมตรจะเท่ากับ:
N = 286.4 ม. * 654.12 * 9.81 ม./วินาที * 0.6 = 1102683 กิโลวัตต์ = 1102.6 มิลลิวัตต์
ความสูงของห้องภายในของส่วนปั๊มอยู่ที่ 13 ม. จากนั้นส่วนปั๊มเหล่านี้สามารถใช้กับความสูงของคลื่นไม่เกิน 12 ม. สำหรับการใช้งานปกติคลื่น 1 ม. ก็เพียงพอแล้ว น้ำส่วนเกินทั้งหมด จะถูกปล่อยลงอ่างเก็บน้ำ
ในกรณีที่คลื่นสูงกว่า 12 ม. ลูกสูบ [สัมผัส] จะเปิดวาล์วนิรภัยพิเศษและทำให้ส่วนสูบน้ำท่วมโดยลูกสูบจะแขวนอยู่ในตำแหน่งที่จมอยู่ใต้น้ำโดยแต่ละอันอยู่ในกรอบของมันเอง นอกจากนี้ ตามที่กล่าวไว้ก่อนหน้านี้ ส่วนดังกล่าวสามารถถูกน้ำท่วมโดยใช้ไปป์ไลน์มาตรฐานที่ยืดหยุ่นซึ่งเชื่อมต่ออย่างถาวร และนำออกจากบริการหากจำเป็น เมื่อพายุหยุดลงและความสูงของคลื่นเข้าใกล้พารามิเตอร์ที่คำนวณได้ ปริมาณอากาศจำนวนหนึ่งจะถูกสูบเข้าไปในส่วนสูบน้ำและจะกลับสู่สภาพการทำงาน
ลองคำนวณกำลังสูงสุดที่เป็นไปได้ของสถานีที่เลือกที่คลื่น 5 ม.
วา =3.14*1.5²*5 – 3.14*0.4²*5 = 32.813 ลบ.ม.
Vв=3.14*1.5²*5=35.325m³
เทียบกับ=Vа + Vв= 32.813m³ + 35.325m³ =68.138m³ *4 =272.552m³
ในหนึ่งวินาทีประสิทธิภาพของส่วนสูบน้ำที่มีคลื่น 5 ม. จะเท่ากับ:
Qns = 272.552m³: 6 =45.425m³/วินาที
ΣQns=72*45.425m³=3270.6 m³/วินาที
ดังนั้นพลังงานโดยประมาณที่คลื่น 5 เมตรจะเท่ากับ:
N= 286.4 ม. * 3270.6 ลบ.ม./วินาที * 9.81 ม./วินาที² * 0.6 =9189042 กิโลวัตต์ =9189 เมกะวัตต์
การคำนวณการคืนทุนของโครงการ MVGe
ที่ Nurek HPP บนแม่น้ำ Vakhsh ซึ่งตั้งอยู่ในภูเขาของทาจิกิสถาน มีการติดตั้งหน่วยไฮดรอลิกที่มีกำลังการผลิต 300 MW แต่ละหน่วย ความสูงของเขื่อนที่ G.E.S. เท่ากับ 300 ม. แรงดันออกแบบเท่ากับ 275 ม. อัตราการไหลของน้ำรวมสำหรับชุดไฮดรอลิก 9 ตัวเท่ากับ 450 ลบ.ม./วินาที ปริมาณการใช้น้ำสำหรับแต่ละยูนิตคือ 50 ลบ.ม./วินาที หากเรานำข้อมูลเหล่านี้เป็นอะนาล็อก ในกรณีของเรา ด้วยส่วนหัว 286.4 ม. และการไหลของน้ำรวม 654.12 ลบ.ม./วินาที จึงเป็นไปได้ที่จะใช้หน่วยไฮดรอลิก 13 ตัวที่มีกำลังการผลิตรวมที่โรงไฟฟ้าทางทะเลที่เป็นปัญหา ด้วยคลื่น 1 ม.:
Nwave1m=ΣQns:50m³/วินาที x 300MW =654.12 m³/วินาที:50m³/วินาที x300MW =3900MW/ชั่วโมง
ดังนั้น ด้วยคลื่นสูง 5 เมตร พลังงานทั้งหมดที่สร้างขึ้นจะเท่ากับ:
Nwave5m=3270.6 ลบ.ม./วินาที: 50 ลบ.ม./วินาที * 300MW = 65*300 =19500MW
ปริมาณน้ำซึ่งพิจารณาจากผลผลิตของส่วนสูบน้ำ 72 ส่วนบนคลื่นสูง 5 เมตร สามารถใช้ได้ 65 ยูนิต แต่ละส่วนมีกำลังการผลิต 300 เมกะวัตต์ เห็นได้ชัดว่าเป็นไปไม่ได้เลยที่จะติดตั้งชุดไฮดรอลิกจำนวนดังกล่าวในพื้นที่ที่กำหนด
สมมติว่ามีเงื่อนไขว่าจะมีการติดตั้ง 12 ยูนิตดังกล่าวบนแพลตฟอร์มที่อยู่ระหว่างการพิจารณา โดยจะมี 4 ยูนิตในแต่ละห้องเครื่องจากทั้งหมด 3 ห้อง ขนาดของแต่ละห้องโถงตามที่ระบุไว้ในตอนต้นของคำอธิบายคือ 130 ม. * 40 ม. สมมติว่าคลื่นเฉลี่ยต่อปีอยู่ที่ประมาณ 2.5 ม. (สำหรับการโหลดปกติ 12 หน่วยคือคลื่น ประมาณ 1 เมตรก็เพียงพอแล้ว) และพลังงานที่สร้างขึ้นจะอยู่ที่ประมาณเท่ากับ ซึ่งสามารถผลิตได้ 12 หน่วยที่ทำงานต่อเนื่องเป็นเวลา 10 เดือน สมมติว่าสภาพอากาศจะสงบอย่างสมบูรณ์เป็นเวลาสองเดือนของปี จากนั้นไฟฟ้าทั้งหมดที่ผลิตได้ใน 10 เดือนจำนวน 12 หน่วยจะเท่ากับ:
ΣN10 = 300 MW * 12 หน่วย * 24 ชั่วโมง * 300 วัน = 25920000 MW
ราคา 1 MW คือ 60 มานัส (60: 0.8 = 75 ดอลลาร์) จากนั้นในหนึ่งปีโรงไฟฟ้านี้สามารถผลิตไฟฟ้าได้ในปริมาณเท่ากับ:
25920000 * 60 =1555200000 มนัส =1944000000 $
หากเราคำนึงว่าต้นทุนของแท่นผลิตน้ำมันสุดท้ายที่ติดตั้งบนทะเลแคสเปียนในปี 2551 เท่ากับ 3.5 - 4 พันล้านมานัส และหากเราสมมติว่าต้นทุนของโรงไฟฟ้านี้จะมีราคาสูงกว่า 1.5 เท่า ระยะเวลาคืนทุน สำหรับโรงไฟฟ้าแห่งนี้จะมีอายุประมาณ 3 ถึง 4 ปี
ดังนั้น ระยะเวลาคืนทุนสำหรับโรงไฟฟ้านอกชายฝั่งที่เสนอจึงสั้นกว่าระยะเวลาคืนทุนสำหรับโรงไฟฟ้าพลังน้ำที่มีกำลังการผลิตใกล้เคียงกันซึ่งสร้างบนบก โดยไม่นับผลกระทบด้านสิ่งแวดล้อมที่ไม่พึงประสงค์ที่เกี่ยวข้องกับโครงสร้างไฮดรอลิกที่สร้างขึ้น
MVGe เป็นแหล่งพลังงานที่ไม่สิ้นสุดและมีพลังงานไม่จำกัด
หากกำลังการผลิตของโรงไฟฟ้าพลังน้ำในแม่น้ำใด ๆ ถูกกำหนดโดยความเป็นไปได้ในการกักเก็บน้ำ ดังนั้นในกรณีของการก่อสร้างโรงไฟฟ้าพลังน้ำนอกชายฝั่ง ปริมาณน้ำที่จำเป็นจะมีปริมาณมากเสมอ เนื่องจากพื้นที่ของ หน่วยไฟฟ้าพลังน้ำจะช่วยให้สามารถวางส่วนปั๊มประสิทธิภาพสูงตามจำนวนที่ต้องการได้เสมอ กล่าวอีกนัยหนึ่ง เป็นไปได้ที่จะสร้างโรงไฟฟ้าที่มีกำลังการผลิตตามที่ต้องการอย่างแน่นอน และน้ำส่วนเกินและความสามารถในการรับแรงดันที่ค่อนข้างสูงจะทำให้ในอนาคตสามารถออกแบบกังหันที่มีขนาดเล็กกว่ามากได้
นอกจากนี้ พลังที่ไม่จำกัดของสถานีเหล่านี้จะช่วยให้สามารถสร้างโรงงานแยกเกลือออกจากพื้นที่แห้งแล้งบริเวณชายฝั่งของโลกได้ และในอนาคตโรงงานที่ใช้พลังงานสูงจะตั้งอยู่กลางทะเล โดยเฉพาะโรงงานผลิตไฮโดรเจนซึ่งเป็นเชื้อเพลิงรถยนต์ที่เป็นมิตรต่อสิ่งแวดล้อมมากที่สุด นอกจากนี้ ในแง่ของโรงไฟฟ้าพลังงานต่ำ [5-10 เมกะวัตต์] พืชดังกล่าวสามารถใช้ในการก่อสร้างแท่นผลิตน้ำมันนอกชายฝั่งเพื่อตอบสนองความต้องการของตนเอง ซึ่งจะช่วยประหยัดเชื้อเพลิงไฮโดรคาร์บอนและไม่ก่อให้เกิดมลพิษต่อชั้นบรรยากาศ
การติดตั้งและการรื้อถอน
ยังคงต้องพิจารณาปัจจัยที่สำคัญอีกประการหนึ่ง - สิ่งนี้ การติดตั้งและการรื้อถอนส่วนปั๊มทั้งระหว่างการติดตั้งทั่วไปของสถานีและระหว่างการบำรุงรักษาบริการ ความยากลำบากอยู่ที่ความจริงที่ว่างานจะต้องเสร็จไม่เพียง แต่ในสภาพอากาศที่สงบเท่านั้น แต่ยังหมายถึงความยากลำบากบางอย่างด้วย ให้เราแบ่งการดำเนินงานนี้เป็นขั้นตอนที่แยกจากกัน
ขั้นตอนแรกคือการติดตั้งคานรองรับสองตัวเหนือช่องเปิดบนพื้นในตำแหน่งของส่วนปั๊มที่ติดตั้ง จากนั้นเมื่อใช้เครนเหนือศีรษะ ส่วนการสูบน้ำจะถูกลดระดับลงในช่องเปิด ลูกกลิ้งแต่ละตัวจะถูกนำทางไปตามพื้นผิวรองรับ และส่วนนั้นจะถูกติดตั้งโดยส่วนบนที่ขยายออกบนคาน
ขั้นตอนที่สองคือการติดตั้งกลุ่มลูกสูบของท่อส่งน้ำแข็งสี่เส้นโดยใช้เครนเหนือศีรษะและลดระดับลงด้านในจนกระทั่งติดตั้งที่ด้านล่างของส่วนปั๊ม
ขั้นตอนที่สามคือการติดตั้งฝาครอบด้านใน บุชชิ่ง และฝาครอบด้านบน
ขั้นตอนที่สี่คือการติดตั้งอุปกรณ์พิเศษซึ่งเป็นแท่นรองรับที่ครอบคลุมช่องเปิดส่วนสูงประมาณ 4-5 ม. โดยมีบล็อกติดอยู่ที่ระนาบด้านบนติดตั้งทั้งสองด้านและมีกว้านทรงพลังสองตัวจับจ้องไปที่ พื้นในสถานที่มาตรฐาน โดยสามารถรับน้ำหนักได้ประมาณ 600 ตันต่อชั้น ในขั้นตอนเดียวกัน ท่ออากาศและท่อน้ำมาตรฐาน ยืดหยุ่น และแรงดันสูงจะเชื่อมต่อกับส่วนนี้ จำเป็นต้องใช้ท่อน้ำเพื่อทำให้ส่วนน้ำท่วมตามความจำเป็น และจำเป็นต้องใช้ท่อลมเพื่อไล่น้ำบางส่วนและทำให้ส่วนลอยตัวได้
ในขั้นตอนที่ห้าโดยใช้กว้านส่วนจะถูกยกขึ้นพร้อมกับสตรัทลูกสูบและคานรองรับจะถูกลบออก
ขั้นตอนที่หกคือการลดส่วนปั๊มลงไปยังที่ทำงานโดยใช้กว้านเสริมสองตัว ในขณะที่กลุ่มลูกสูบถูกยึดเข้ากับเครน เมื่อส่วนสัมผัสกับน้ำ น้ำจะค่อยๆ เต็มไปด้วยน้ำเพื่อไม่ให้ลอยตัว แต่ในขณะเดียวกันก็อย่าให้เครื่องกว้านที่ต่ำกว่าโหลดมากเกินไป การสืบเชื้อสายจะดำเนินการจนกว่าส่วนจะแขวนบนตารางนำทาง ทั้งหมดนี้ทำขึ้นเพื่อขจัดปัจจัยลบของอิทธิพลของคลื่น
ในขั้นตอนที่ 7 โดยใช้เครน ในที่สุดจึงติดตั้งกลุ่มลูกสูบ ท่อน้ำเชื่อมต่อกับพื้นและเชื่อมต่อถึงกัน หลังจากนั้นอุปกรณ์เสริมจะถูกถอดออกและยึดปลายด้านบนของเชือกสลิงด้วยความช่วยเหลือของการลดส่วนปั๊มลง โดยจะติดอยู่กับกลไกความตึงซึ่งมีการออกแบบคล้ายกับกลไกการหดกลับของสายวัดทั่วไป ปลายด้านล่างจะยังคงติดอยู่กับส่วนปั๊มระหว่างการทำงานครั้งต่อไป พวกเขาจะถูกนำมาใช้ในภายหลังเมื่อทำการรื้อส่วนต่างๆ การทำเช่นนี้เพื่อขจัดความเสี่ยงในอนาคตเมื่อเหวี่ยงส่วนบนคลื่น เพื่อให้ส่วนพร้อมสำหรับการทำงานในที่สุด จะต้องบีบน้ำจำนวนหนึ่งโดยใช้อากาศ
ระเบียบวิธีในการคำนวณพารามิเตอร์ MVGE สำหรับกำลังที่กำหนด
1. ความจำเป็น พลังของโรงไฟฟ้าคลื่นทะเล.
2. สำหรับกำลังที่กำหนด กังหันไฮดรอลิกที่ผลิตในเชิงพาณิชย์และเครื่องกำเนิดไฟฟ้าไฮดรอลิก หรืออุปกรณ์ไฟฟ้าหลายหน่วยที่ร่วมกันให้กำลังที่กำหนดจะถูกเลือก
3. โดยใช้ข้อมูลอ้างอิง จะกำหนดปริมาณน้ำที่ต้องการ (เป็นลูกบาศก์เมตร/วินาทีและความดัน วัดเป็นเมตรของคอลัมน์น้ำ) ต่อหน่วยอุปกรณ์
5. เลือกเส้นผ่านศูนย์กลางของท่อส่งน้ำที่อยู่นิ่งและลูกสูบเอง
6. เลือกการออกแบบส่วนปั๊มซึ่งอาจประกอบด้วยลูกสูบเดี่ยวหรือลูกสูบคู่
7. ขึ้นอยู่กับความลึกในการติดตั้งของแท่นนอกชายฝั่ง และความสูงของคลื่นสูงสุดที่เป็นไปได้ในตำแหน่งที่กำหนด จังหวะลูกสูบสูงสุดจะถูกนำมาใช้
8. ขนาดโดยรวมของส่วนโป๊ะของส่วนปั๊มขึ้นอยู่กับจังหวะสูงสุดของลูกสูบ
9. ขึ้นอยู่กับขนาดโดยรวมของห้องเคลื่อนที่ของส่วนปั๊ม (ยกเว้นปริมาตรของห้องลูกสูบ "A" และ "B") จะคำนวณการลอยตัว (การเคลื่อนที่) ของส่วนปั๊ม
10. น้ำหนักของห้องโป๊ะคำนวณตามขนาดทางเรขาคณิตของห้องและความหนาของวัสดุที่ใช้ทำ
11. การเลือกความเท่าเทียมกันของแรงจะถูกเลือกโดยการทำให้ห้องโป๊ะน้ำท่วมบางส่วน (น้ำหนักของโป๊ะบวกกับน้ำที่อยู่ภายในและการลอยตัว)
12. ปริมาตรของน้ำในห้องทำงาน "A" และ "B" คำนวณสำหรับการเคลื่อนที่ของห้องโป๊ะที่กำหนดซึ่งสัมพันธ์กับลูกสูบที่อยู่นิ่ง
13. ขึ้นอยู่กับช่วงเวลาของคลื่นในพื้นที่ที่ติดตั้งแท่นนอกชายฝั่ง จะมีการคำนวณประสิทธิภาพของหนึ่งส่วนการสูบต่อวินาที
14. เลือกจำนวนส่วนการสูบขั้นต่ำที่ต้องการเพื่อให้แน่ใจว่าการทำงานของชุดไฮดรอลิกที่ความสูงของคลื่นที่กำหนด
15. โดยคำนึงถึงการจัดเรียงส่วนการสูบน้ำที่สมมาตรและสม่ำเสมอทั่วทั้งพื้นที่ของแพลตฟอร์มนอกชายฝั่ง (ในกรณีนี้จำนวนส่วนการสูบน้ำอาจมากกว่าจำนวนที่คำนวณได้) มิติทางเรขาคณิตของแพลตฟอร์มนั้นคือ เลือกแล้ว ในกรณีที่มีส่วนสูบจำนวนมาก กำลังไฟฟ้าที่ระบุจะได้ที่คลื่นต่ำกว่าความสูงที่คำนวณได้
16. จากข้อเท็จจริงที่ว่าการออกแบบส่วนสูบน้ำนี้สามารถพิจารณาได้ทั้งปั๊มลูกสูบและเครื่องอัดไฮดรอลิกพร้อมกันและเมื่อทราบเส้นผ่านศูนย์กลางของลูกสูบและเส้นผ่านศูนย์กลางของท่อส่งน้ำไปยังใบพัดกังหันไฮดรอลิกก็เป็นไปได้ที่จะ คำนวณแรงดันน้ำในขณะที่มันกระทบใบมีดเหล่านี้
17. โดยใช้วิธีการเลือกหน้าตัดของท่อส่งน้ำ ณ จุดที่น้ำกระทบใบพัดกังหันไฮดรอลิกเรานำแรงดันมาสู่พารามิเตอร์ที่ต้องการ
18. ในกรณีที่ไม่มีอุปกรณ์ไฮดรอลิกสำรอง น้ำส่วนเกินทั้งหมดจะถูกปล่อยกลับเข้าสู่อ่างเก็บน้ำ หากมีอุปกรณ์ดังกล่าวก็สามารถใช้งานได้เช่นกันเมื่อคลื่นสูงกว่าที่คำนวณไว้ แต่ในทุกกรณี ของเสียและน้ำส่วนเกินจะถูกระบายออกสู่อ่างเก็บน้ำ
ปัญหาจำนวนหนึ่งที่ต้องมีการตรวจสอบการทดลอง
ยังมีอยู่ครับ คำถามจำนวนหนึ่งคำตอบที่จะได้รับเท่านั้น ทดลอง.
นี่คือลักษณะการทำงานของโครงสร้างทั้งหมดภายใต้น้ำหนักบรรทุกหลายตันที่แปรผันในระยะยาวบนฐานของชั้นล่าง
นี่คือวิธีที่ซีลป้องกันการเสียดสีจะทำงานเมื่อรับน้ำหนักหลายตัน และวัสดุใดที่เหมาะสมที่สุดสำหรับซีลเหล่านี้
นี่คือสิ่งที่จะต้องเลือกสลิงและวัสดุที่จะทำจากวัสดุเนื่องจากจะต้องสัมผัสกับน้ำทะเลตลอดเวลา
นี่คือวิธีการตรวจสอบให้แน่ใจว่าสลิงเหล่านี้ตึงเมื่อส่วนปั๊มทำงาน
นี่คือวิธีที่ใบพัดกังหันไฮดรอลิกจะทำงานเมื่อทำงานในสภาพแวดล้อมที่รุนแรงทางทะเลเผชิญกับภาระที่เร้าใจและอาจเป็นคำถามอื่น ๆ อีกมากมาย แต่ทั้งหมดนี้สามารถแก้ไขได้เมื่อคำถามหลักได้รับการแก้ไข - มีโอกาสสำหรับโครงการที่เสนอหรือไม่ การใช้งานและการพัฒนา
โรงไฟฟ้าได้รับการออกแบบให้ผลิตกระแสไฟฟ้าโดยใช้พลังงานคลื่น อุปกรณ์ประกอบด้วยตัวลอยพร้อมเครื่องกำเนิดไฟฟ้าและลอยอยู่บนเพลาแนวนอน บนโป๊ะที่เว้นระยะห่างจะมีโครงค้ำยันขนานกันตามขวางโดยมีส่วนรองรับเพลา ในแต่ละเพลาจะมีการติดตั้งลูกลอยโดยมีระยะห่างขั้นต่ำในรูปแบบของกึ่งทรงกระบอกกลวงพร้อมกับน้ำหนักเพิ่มเติมและการยื่นออกมาตามปริมาตร ในกรณีนี้เพลาขนานที่ใกล้ที่สุดจะเชื่อมต่อกันโดยใช้ระบบส่งกำลังแบบเกียร์ เพลาซึ่งอยู่ในแนวเดียวกันบนฝั่งตรงข้ามของโป๊ะที่มีกลไกขับเคลื่อนไปยังเครื่องกำเนิดไฟฟ้ายังเชื่อมต่อถึงกันและมีเกียร์ธรรมดา กระปุกเกียร์ และเครื่องกำเนิดไฟฟ้า การออกแบบโรงไฟฟ้าทำให้สามารถเพิ่มกำลังไฟฟ้าที่ดึงออกจากน้ำขนาด 1 ม. 2 ได้ 4 z.p.f-py, 4 ป่วย
สิ่งประดิษฐ์นี้เกี่ยวข้องกับพลังงาน โดยเฉพาะการผลิตกระแสไฟฟ้าโดยใช้พลังงานของคลื่นทะเลอันเนื่องมาจากการขึ้นลงของคลื่นในแนวดิ่ง โรงไฟฟ้าพลังงานคลื่นชื่อดัง เช่น N 1373855 F 03 B 13/12 ประกอบด้วยตัวลอยพร้อมเครื่องกำเนิดไฟฟ้า กังหันอากาศสำหรับห้องรับคลื่นพร้อมลูกลอย ห้องต่างๆ มีลักษณะเป็นกระจก โดยปลายเปิดจะจมอยู่ใต้น้ำ นอกจากนี้ เพื่อเพิ่มประสิทธิภาพ แต่ละห้องมีการติดตั้งกังหันอากาศและปั๊มไฮดรอลิกเพิ่มเติมที่เชื่อมต่อกับลูกลอยโดยใช้ไม่มีที่สิ้นสุด การส่งผ่านโซ่ . ข้อเสียเปรียบหลักของการติดตั้งนี้คือกำลังที่จำกัดที่เกี่ยวข้องกับการลอยขึ้นอย่างช้าๆ เท่ากับการเพิ่มขึ้นของคลื่น และความจริงที่ว่าโซ่อยู่ภายใต้แรงลอยตัวที่จำกัดจากการลอย ซึ่งเท่ากับครึ่งหนึ่งของปริมาตรของ ทุ่น เนื่องจากความถ่วงจำเพาะของทุ่นคือ 0.5 g/cm 3 กลไกและอุปกรณ์ส่งสัญญาณจำนวนมากทำให้การติดตั้งยุ่งยากและทำให้เกิดการสูญเสียพลังงานอย่างมาก ซึ่งจะลดผลกระทบของการใช้ลูกลอย รู้จักโรงไฟฟ้าพลังงานคลื่น (สิทธิบัตร RF N 2049925, คลาส 6 F 03 B 13/12, 6 F 03 B 13/22 ลงวันที่ 02/06/1992) บรรจุวัตถุลอยน้ำพร้อมเครื่องกำเนิดไฟฟ้า กังหันอากาศ และคลื่น ห้องรับในรูปแบบของปลายเปิดของแว่นตาที่จมอยู่ใต้น้ำซึ่งติดตั้งภายในด้วยทุ่นรูปตัว L ติดตั้งบนเพลาแนวนอนที่มีความเป็นไปได้ที่จะหมุนข้างเดียวในขณะที่ส่วนที่ยื่นออกมาของการลอยหนึ่งจะยาวหรือหนักกว่าอีกอัน เพลาทั้งหมดเชื่อมต่อถึงกัน กล่องเกียร์แบบสเต็ปอัพเชื่อมต่อกับส่วนหลัง และเพลากังหันอากาศโดยใช้คัปปลิ้งเกียร์แบบโอเวอร์รันนิ่ง และเพลากังหันเชื่อมต่อกับเครื่องกำเนิดไฟฟ้า ข้อเสียเปรียบหลักของโรงไฟฟ้าพลังคลื่นนี้คือประสิทธิภาพต่ำและความซับซ้อนในการออกแบบ เนื่องจากผลกระทบในระยะสั้นของคลื่นที่มีต่ออากาศอัดในห้อง ทำให้ไม่สามารถถ่ายโอนอากาศทั้งหมดที่ถูกบีบอัดในห้องไปยังกังหันอากาศได้ และด้วยการเพิ่มขึ้นของ พื้นที่การไหลของท่ออากาศและตัวกังหันเอง ความดันอากาศในห้อง และดังนั้น กำลังขับออกจากกังหันจะลดลง ทุ่นรูปทรงตัว L ไม่อนุญาตให้ใช้พื้นที่อย่างมีประสิทธิภาพในแง่ของการเพิ่มแรงลอยตัว และสร้างความต้านทานไฮดรอลิกที่ดียิ่งขึ้นเมื่อส่วนที่ยื่นออกมาหมุน นอกจากนี้ การออกแบบโรงไฟฟ้าพลังคลื่นที่ใช้พลังงานลมอัดนั้นซับซ้อนมากในการผลิตและดำเนินการ และต้องใช้ต้นทุนเงินทุนจำนวนมากในการผลิตกังหัน โรงไฟฟ้าพลังงานคลื่นตามสิทธิบัตร RF N 2049925 ถูกนำมาใช้เป็นต้นแบบ วัตถุประสงค์ของการประดิษฐ์คือเพื่อทำให้การออกแบบง่ายขึ้นและเพิ่มกำลังของโรงไฟฟ้าพลังงานคลื่น นี่คือความสำเร็จโดยความจริงที่ว่าในโรงไฟฟ้าพลังงานคลื่นที่มีร่างกายลอยตัวพร้อมเครื่องกำเนิดไฟฟ้าลอยอยู่บนเพลาแนวนอนที่มีความเป็นไปได้ที่จะหมุนข้างเดียวซึ่งครอบครองตำแหน่งที่ไม่เสถียรในน้ำกลายเป็นสถานะที่ไม่สมดุลและ การเคลื่อนที่แบบหมุนเร่งในขณะที่จมอยู่ในทุ่นโดยสมบูรณ์กระปุกเกียร์แบบขั้นบันไดที่เชื่อมต่อเพลากับเครื่องกำเนิดไฟฟ้าตัวถังลอยทำในรูปแบบของการเชื่อมต่อโป๊ะแคบ ๆ อย่างน้อยสองอันโดยเว้นระยะห่างกันในความกว้างและติดตั้งด้านบนด้วย ขาหยั่งที่อยู่ตามขวางขนานกันในแต่ละขาหยั่งด้านล่างมีการติดตั้งวงเล็บที่รองรับเพลาแบบโคแอกเชียลลอยอยู่ระหว่างส่วนรองรับทั้งหมดในอนุกรมโดยมีช่องว่างปลายน้อยที่สุดซึ่งป้องกันการติดขัดของทุ่นลอยระหว่างการหมุนสัมพัทธ์ ปลายเอาท์พุทของเพลาเชื่อมต่อโดยตรงกับเฟืองบนเพลาอินพุตของกระปุกเกียร์หรือผ่านเฟืองโอเวอร์ไดรฟ์ลูกลอยทำในรูปแบบของครึ่งสูบปิดผนึกกลวงและติดตั้งด้วยน้ำหนักเพิ่มเติมและตั้งอยู่ตรงข้าม จากแกนด้านข้างโดยการยื่นออกมาเชิงปริมาตรในรูปแบบของการลอยเพิ่มเติมในขณะที่ช่วงเวลาที่สร้างโดยน้ำหนักของการยื่นออกมาเชิงปริมาตรนั้นมากกว่า (ประมาณ 5-10%) มากกว่าช่วงเวลาที่สร้างขึ้นโดยภาระเพิ่มเติมและ โมเมนต์ที่เกิดจากแรงลอยตัวเมื่อส่วนที่ยื่นออกมาของปริมาตรหนึ่งจุ่มอยู่ในน้ำจะมีค่ามากกว่าโมเมนต์ซึ่งเกิดจากน้ำหนักของส่วนที่ยื่นออกมาของปริมาตร ผลกระทบที่ไม่สมดุลต่อการลอยตัวของน้ำและการไหลของอากาศ และแรงเสียดทานในขณะที่ลูกลอยเริ่มหมุน . ในกรณีนี้ ปลายด้านออกของเพลาที่อยู่ติดกันของโครงรองรับจะเชื่อมต่อกันเป็นคู่หรือมากกว่านั้นโดยเข้าเกียร์และติดตั้งกระปุกเกียร์ทั่วไปและเครื่องกำเนิดไฟฟ้า และส่วนลอยบนเพลาที่เชื่อมต่อถึงกันนั้นอยู่ในตำแหน่งแบบสมมาตร ส่วนปลายด้านออกของเพลาโคแอกเซียลของ ขาหยั่งที่วางอยู่ในบรรทัดเดียวเชื่อมต่อถึงกันและติดตั้งเกียร์ธรรมดากระปุกเกียร์และเครื่องกำเนิดไฟฟ้าปริมาตรที่ยื่นออกมาของทุ่นจะรวมเข้ากับกึ่งสูบโดยทำให้เส้นรอบวงของกึ่งสูบยาวขึ้น - กระบอกสูบพื้นผิวด้านหน้าของปริมาตรที่ยื่นออกมาในทิศทางการหมุนของการลอยทำในรูปแบบของลิ่มที่แคบ ในรูป 1 รูป แบบฟอร์มทั่วไปโรงไฟฟ้าพลังคลื่น ดังภาพ 2 แสดงมุมมองด้านบน รูปที่ 2 3 แสดงทุ่นลอยที่แยกจากกัน และรูปที่ 4 พื้นผิวของมัน ในกรณีนี้จะมีการระบุ - มุมการหมุนของการลอยไปยังตำแหน่งปัจจุบัน, Q o - แรงลอยตัวที่กระทำต่อการลอยในตำแหน่งเริ่มต้น, P - น้ำหนักของการลอย, h p - ไหล่จากน้ำหนัก แรงลอยตัว C ใน - จุดศูนย์กลางของมวลน้ำในปริมาตรของส่วนที่จมอยู่ของการลอย , Q - แรงลอยตัวในตำแหน่งปัจจุบัน, h ใน - ไหล่ของแรงลอยตัว, P ov - น้ำหนัก ของการยื่นออกมาเชิงปริมาตร P d - น้ำหนักของภาระเพิ่มเติม Y st - ระยะห่างจากแกน O ถึงจุดศูนย์กลางของมวลน้ำในปริมาตรของส่วนที่แช่อยู่ของการลอย (สำหรับเซกเตอร์ที่มีมุม ![]() Y sp คือระยะห่างจากแกน O ถึงจุดศูนย์กลางมวลของการลอย h ov คือไหล่จากแรงน้ำหนักของส่วนที่ยื่นออกมาเชิงปริมาตร h d คือไหล่จากแรงน้ำหนักของภาระเพิ่มเติม l คือความยาวของ การลอยตัว R คือรัศมีภายนอกของการลอย โรงไฟฟ้าพลังงานคลื่นประกอบด้วยตัวลอยน้ำที่สร้างขึ้นในรูปแบบของทุ่นแคบ ๆ อย่างน้อยสองตัวโดยเว้นระยะห่างกันในความกว้าง (รูปที่ 1 แสดงทุ่น 3 อัน - 1, 2 และ 3) เชื่อมต่อกันด้วยคาน 4 และ 5 โป๊ะ 1 และ 3 ถูกสร้างขึ้นในรูปแบบของท่อปิดผนึกกลวง และโป๊ะกลาง 2 มีรูปทรงคล้ายกล่องเพื่อรองรับกลไกการขับเคลื่อน บนโป๊ะมีการติดตั้งโครงค้ำยัน 6 ชิ้นพาดขวางและขนานกันโดยวางปลายไว้บนโป๊ะ ตามสะพานลอยแต่ละอัน 6 จะมีการติดตั้งตัวยึด 7 ที่รองรับเพลา 8 แบบโคแอกเชียลจากด้านล่าง ระหว่างส่วนรองรับทั้งหมดของวงเล็บ 6 จะมีการติดตั้งโฟลต 9 บนเพลาโดยมีความเป็นไปได้ในการหมุนทางเดียว หรือกลไกวงล้อ) ลูกลอย 9 ตั้งอยู่ตามลำดับบนเพลาโดยมีช่องว่างปลายน้อยที่สุด ช่วยขจัดปัญหาการติดขัดของลูกลอยในระหว่างการหมุนสัมพัทธ์เนื่องจากอุณหภูมิและการเปลี่ยนรูปของแรง ที่ปลายเอาท์พุทของเพลา 8 มีการติดตั้งเกียร์ 10 ซึ่งอยู่ในตาข่ายโดยตรงกับเกียร์ (ไม่แสดงในรูป) บนเพลาอินพุตของกระปุกเกียร์เร่งความเร็ว 11 หรือผ่านเกียร์เร่งความเร็วเพิ่มเติม (ไม่แสดง ในรูป) เกียร์ 10 ทำหน้าที่เป็นมู่เล่ไปพร้อมกัน เพลาส่งออกของกระปุกเกียร์ 11 แต่ละตัวเชื่อมต่อกับเพลาของเครื่องกำเนิดไฟฟ้า 12 (ติดตั้งกระปุกเกียร์ 11 หากจำเป็น สามารถส่งไปยังเครื่องกำเนิดไฟฟ้าโดยไม่ต้องใช้กระปุกเกียร์) ลูกลอย 9 (ดูรูปที่ 3) ทำขึ้นในรูปของกระบอกสูบกึ่งปิดผนึกกลวง นอกจากนี้ ยังมีส่วนที่ยื่นออกมาตามปริมาตร 13 (เหนือแกน OX) ซึ่งทำในรูปแบบ แต่ละองค์ประกอบ หรืออินทิกรัลกับครึ่งสูบ ดังแสดงในรูป 3 (การยื่นออกมาของปริมาตรทำได้โดยการยืดเส้นรอบวงของกึ่งทรงกระบอกให้ยาวขึ้นเป็นมุมจากแกน OX) และสร้างเซกเตอร์เพิ่มเติม ด้านตรงข้าม มีการติดตั้งน้ำหนักเพิ่มเติม 14 ไว้ภายในลูกลอย เพื่อให้โมเมนต์ที่สร้างขึ้นโดยน้ำหนักของส่วนที่ยื่นออกมาเชิงปริมาตร 13 เท่ากับหรือมากกว่า (ประมาณ 5-10%) มากกว่าโมเมนต์ที่สร้างโดยน้ำหนักเพิ่มเติม 14 และแรงลอยตัวที่กระทำต่อส่วนที่ยื่นออกมา 1 ปริมาตร 13 เมื่อแช่อยู่ในน้ำจะต้องสร้างแรงบิดที่มากกว่าโมเมนต์ที่เกิดจากน้ำหนักของส่วนที่ยื่นออกมาตามปริมาตร ผลกระทบที่วุ่นวายและไม่สมดุลต่อการลอยตัวของน้ำและการไหลของอากาศ และแรงเสียดทานที่กระทำ ในขณะนี้ลูกลอยเริ่มหมุน ส่วนที่ยื่นออกมาของปริมาตร 13 เป็นองค์ประกอบเริ่มต้นที่จะนำการลอยจากสภาวะสมดุลที่ไม่เสถียรไปสู่สถานะที่ไม่สมดุลโดยการหมุนแบบเร่งของทุ่น (ตีลังกา) เมื่อทุ่นจมอยู่ในน้ำจนหมด ขนาดของโรงไฟฟ้าพลังคลื่น จำนวนโป๊ะและโครงลอยที่มีทุ่นขึ้นอยู่กับการกำจัดไฟฟ้าที่วางแผนไว้ ในเวลาเดียวกันเพื่อให้แน่ใจว่าการหมุนของเครื่องกำเนิดไฟฟ้ามีความสม่ำเสมอมากขึ้นตลอดจนเพื่อลดจำนวนกลไกการขับเคลื่อนที่ใช้ (เกียร์ตัวลดเกียร์ข้อต่อ ฯลฯ ) ปลายเอาต์พุตของเพลาที่อยู่ติดกันของโครงขาจะเชื่อมต่อเป็นคู่ หรือมากกว่านั้นโดยเข้าเกียร์ที่ปลายเอาท์พุตของเพลาระหว่างร่วมกับการติดตั้งกระปุกเกียร์ทั่วไป เครื่องกำเนิดไฟฟ้า และเกียร์โอเวอร์ไดรฟ์ และลูกลอยบนเพลาที่เชื่อมต่อกันทางจลนศาสตร์จะอยู่ในตำแหน่งสมมาตรสัมพันธ์กับระนาบที่ผ่านไปตรงกลาง ระยะห่างระหว่างเพลา ในกรณีนี้ เส้นโครงเชิงปริมาตรของการลอยบนเพลาหนึ่งจะอยู่ที่ฝั่งตรงข้ามโดยสัมพันธ์กับตำแหน่งของเส้นโครงเชิงปริมาตรของการลอยบนเพลาอีกอันหนึ่ง การจัดเรียงลูกลอยนี้ช่วยให้เพลาที่เชื่อมต่อทางจลนศาสตร์หมุนไปในทิศทางที่ต่างกัน เมื่อจำนวนโป๊ะมากกว่าสองชิ้น เพื่อให้แน่ใจว่าการหมุนของเครื่องกำเนิดไฟฟ้ามีความสม่ำเสมอมากขึ้น และลดจำนวนกลไกการขับเคลื่อนและเครื่องกำเนิดไฟฟ้าที่ใช้ โครงและเพลาบนโป๊ะที่อยู่ติดกันจะถูกวางไว้ในบรรทัดเดียว ในกรณีนี้ปลายด้านออกของขาหยั่งบนโป๊ะที่อยู่ติดกันจะเชื่อมต่อถึงกัน (โดยใช้ข้อต่อ) โดยใช้เกียร์ทั่วไปหนึ่งอันที่ปลายด้านออกของเพลาอันใดอันหนึ่งเหล่านี้ บูสเตอร์เกียร์ทั่วไป กระปุกเกียร์ทั่วไป และเครื่องกำเนิดไฟฟ้า ( ดังแสดงในรูปที่ 1) เพื่อลดความต้านทานน้ำเมื่อลูกลอยจมอยู่ในน้ำในขณะที่ทำการหมุนจากตำแหน่งบนสุด (หลังตีลังกา) พื้นผิวด้านหน้า 15 ในทิศทางการหมุนของลูกลอยจะทำในรูปแบบของการตีลังกา ลิ่ม (รูปที่. 4) ลูกลอย 8 ถูกติดตั้งบนเพลาโดยมีช่องว่างและส่งแรงบิดไปยังเพลาโดยใช้คลัตช์แบบโอเวอร์รันซึ่งประกอบด้วยช่องว่างโค้งรูปลิ่ม 16 (เกิดจากพื้นผิวโค้ง 17 ของช่องเพลาและพื้นผิวทรงกระบอกของรูลอย ) และนิ้วที่ใส่สปริง 18 ที่ติดตั้งไว้ภายในช่องว่างโค้งรูปลิ่ม 16 เป็นไปได้ที่จะจับคู่การลอยกับเพลาโดยใช้กลไกวงล้อซึ่งประกอบด้วยวงล้อวงล้อที่ยึดอย่างแน่นหนากับเพลาและอุ้งเท้าที่ติดตั้งอยู่บนการลอย (ไม่ใช่ แสดงในรูป) ในกรณีนี้ เพื่อลดความยาวของเพลา แนะนำให้วางล้อวงล้อและอุ้งเท้าไว้ในร่องลูกลอย โดยทำแบบโคแอกเซียลโดยมีรูลูกลอยที่ด้านข้างของปลายด้านหนึ่งหรือสองด้านของลูกลอย เพื่อให้แน่ใจว่าจะรับประกันการคงตัวของทุ่น ณ เวลาที่เกิดคลื่นที่กำลังซัดเข้ามาตั้งแต่โค้งจนกระทั่งถูกน้ำท่วมจนหมด และด้วยเหตุนี้จึงสร้างพลังงานศักย์สูงสุดของทุ่นที่จมอยู่ใต้น้ำ พร้อมทั้งขยายขีดความสามารถทางเทคโนโลยีในแง่ของการขจัดความจำเป็นที่แม่นยำมาก การผลิตลูกลอย ขอแนะนำให้ตรวจสอบให้แน่ใจว่าโมเมนต์ที่สร้างขึ้นโดยน้ำหนักขององค์ประกอบปริมาตร เกินกว่าโมเมนต์ที่สร้างโดยน้ำหนักของโหลดเพิ่มเติมอย่างเห็นได้ชัด ในกรณีนี้ เพื่อป้องกันไม่ให้ทุ่นหมุนไปในทิศทางตรงกันข้ามภายใต้อิทธิพลของความแตกต่างในช่วงเวลานี้ ที่ระดับพื้นผิวด้านหลัง 19 ของทุ่น 9 จะมีการติดตั้งตัวหยุดแบบเคลื่อนที่ได้แบบสปริงโหลด 20 โดยมีการทับซ้อนกันเล็กน้อยของ พื้นผิวด้านหลังของลูกลอย ติดตั้งแบบหมุนได้บนแท่งคงที่ 21 ที่เกี่ยวข้องกับสะพานลอย เหนือจุดหยุดแบบเคลื่อนย้ายได้ 20 จุดหยุดคงที่ 22 จะถูกจับจ้องไปที่แท่งซึ่งตั้งอยู่นอกโซนการหมุนของทุ่นและจับจุดหยุดแบบเคลื่อนย้ายได้ 20 จากการขึ้นด้านบน เนื่องจากเมื่อลูกลอยจมอยู่ในน้ำก่อนที่ปริมาตรที่ยื่นออกมาจะเริ่มท่วม โมเมนต์ที่ไม่สมดุลซึ่งกระทำในทิศทางตรงกันข้ามกับลูกลอยนั้นไม่มีนัยสำคัญ ดังนั้นแรงของการลอยจากด้านล่างบนจุดหยุดแบบเคลื่อนที่ได้ 20 จึงไม่มีนัยสำคัญ ทำให้สามารถทำให้จุดหยุด 20 มีมวลและปริมาตรน้อย และใช้สปริงที่มีแรงอัดเพียงเล็กน้อยได้ ดังนั้นในระหว่างการหมุนการทำงานของทุ่นและผลกระทบต่อจุดหยุดที่เคลื่อนย้ายได้ 20 เมื่อจากด้านบนพวกมันจะหมุนและกระโจนลงไปในน้ำได้อย่างง่ายดายและไม่ให้ความต้านทานต่อการลอยมากนัก ตัวหยุดคงที่ 22 สามารถทำได้โดยตรงในบานพับของตัวหยุดแบบเคลื่อนย้ายได้ 20 ในรูปแบบของตัวจำกัดการหมุนที่รู้จัก หากโมเมนต์ที่สร้างขึ้นโดยปริมาตรที่ยื่นออกมาและโหลดเพิ่มเติมเท่ากัน จะสามารถกำจัดการใช้ตัวหยุดแบบเคลื่อนที่ได้ 20 และตัวหยุดคงที่ 22 ได้ แต่สำหรับสิ่งนี้ จำเป็นต้องตรวจสอบให้แน่ใจว่าปริมาตรทางด้านขวาของการลอยจากแกน OY เพิ่มขึ้นทีละน้อย เช่น โดยค่อยๆ เพิ่มความยาวของการลอย เมื่อทางด้านขวาของทุ่นจมอยู่ในน้ำ แรงลอยตัวจะเกิดขึ้นมากกว่าทางด้านซ้าย ซึ่งจะทำให้รับประกันการหมุนของทุ่นไปทางส่วนที่ยื่นออกมาตามปริมาตร แต่ในกรณีนี้มันเป็นไปไม่ได้ที่จะรับประกันพลังงานศักย์สำรองสูงสุดของการลอยตัวและการหมุนของมันจะเพียงพอต่อการเพิ่มขึ้นของระดับน้ำในคลื่น ตัวถังลอยน้ำนั้นติดตั้งด้วยลวดสลิง 23 ซึ่งสามารถเปลี่ยนความยาวได้ (เช่น การใช้กว้าน) สิ่งนี้ช่วยให้คุณเปลี่ยนตำแหน่งของร่างกายสัมพันธ์กับทิศทางของคลื่นเพื่อให้แน่ใจว่าการโหลดเพลาที่ราบรื่นยิ่งขึ้นด้วยแรงบิดจากการลอยที่อยู่ในมุมหนึ่งไปยังด้านหน้าของคลื่น ตัวเลือกอื่นสำหรับการเปลี่ยนตำแหน่งเชิงมุมของตัวถังสามารถทำได้ เช่น การใช้กระดูกงูอากาศหรือน้ำ ในการควบคุมตำแหน่งของทุ่นที่สัมพันธ์กับระดับน้ำระหว่างการติดตั้งโรงไฟฟ้า ต้องใช้แม่แรงและตัวเว้นระยะที่ส่วนรองรับของโครงค้ำ ในกรณีนี้ ขอแนะนำให้ดำเนินการติดตั้งเพื่อให้แน่ใจว่าตำแหน่งสูงสุดของลูกลอยสัมพันธ์กับระดับน้ำ และปรับร่างตัวถังโดยใช้การสูบน้ำหรือสูบออกในโป๊ะ คุณสามารถใช้โป๊ะเพิ่มเติมได้โดยการยกหรือลดระดับลงไปในน้ำจนถึงระดับความลึกที่กำหนด เพื่อป้องกันอุปกรณ์จากการตกตะกอนและสร้างสภาพภูมิอากาศปกติสำหรับการทำงานของเจ้าหน้าที่ซ่อมบำรุงจึงมีห้องปิด 24 ไว้ โป๊ะรูปกล่อง 2 ปิดที่ด้านบนพร้อมฟัก การดำเนินงานของโรงไฟฟ้าพลังคลื่นมีดังนี้ ในตำแหน่งเริ่มต้นเมื่อไม่มีคลื่น ลอยทั้งหมด 9 จะครองตำแหน่งต่ำสุดตามรูป 3 แม้ว่าพวกมันอาจสัมผัสน้ำหรือไม่ก็ได้ และอาจจมอยู่ในน้ำเล็กน้อยด้วยซ้ำ (จนถึงระดับน้ำซึ่งในระหว่างการใช้งาน ทุ่นที่ตกลงมาจากตำแหน่งบนสุดอย่างอิสระทำให้เกิดช่วงเวลาที่ไม่สมดุลแม้ว่าส่วนหนึ่งของทุ่นจะจมอยู่ใต้น้ำก็ตาม ในน้ำถึงระดับนี้และการลอยจะกลับสู่ตำแหน่งเดิมอย่างอิสระโดยจมอยู่ใต้น้ำบางส่วน ความแตกต่างในช่วงเวลา M จากน้ำหนักของปริมาตรที่ยื่นออกมา 13 และภาระเพิ่มเติม 14 จะกดโฟลต 9 ไปยังจุดหยุดที่เคลื่อนย้ายได้ 20 ซึ่ง จากนั้นจะถูกกดทับกับจุดหยุดคงที่ 22 เมื่อคลื่นก่อตัว "กำลังมา" ที่มุมแหลมกับแกนของเพลา ลูกลอยจะจมอยู่ในน้ำสลับกัน (ถูกน้ำท่วมด้วยคลื่น) ในกรณีนี้ แรงลอยตัว Q เกิดขึ้นเท่ากับน้ำหนักของน้ำในปริมาตรของทุ่นที่จมอยู่ (ตามกฎของอาร์คิมิดีส) เนื่องจากแรงลอยตัวที่กระทำบนทั้งสองด้านของแกน OY มีค่าเท่ากัน แรงลอยตัวที่เกิดขึ้น Q จะเคลื่อนผ่านขึ้นในแนวตั้งผ่านแกนการหมุนของทุ่น และไม่สร้างแรงบิดเมื่อทุ่นลอยจมลงไปจนสุดแกน OX แรงน้ำหนักของการลอย P ก็ผ่านแกน OX เพียงลงด้านล่างเท่านั้น และไม่สร้างแรงบิด ยกเว้นโมเมนต์ M ที่กล่าวข้างต้น ซึ่งสร้างขึ้นโดยความแตกต่างในช่วงเวลาจากน้ำหนักของปริมาตรที่ยื่นออกมา 13 และน้ำหนักของโหลดเพิ่มเติมซึ่งสมดุลโดยปฏิกิริยา R ของส่วนรองรับจากจุดหยุด 20 และ 21 เมื่อลอยจมอยู่เหนือแกน OX ปริมาตรที่ยื่นออกมา 13 จะถูกน้ำท่วมอันเป็นผลมาจากแรงบิดเพิ่มเติมเกิดขึ้น ซึ่งเกินค่าความแตกต่าง M ในช่วงเวลาหนึ่งจากน้ำหนักของปริมาตรที่ยื่นออกมาและน้ำหนักเพิ่มเติม ด้วยเหตุนี้ทุ่นจึงเริ่มหมุนกระโดดข้ามตำแหน่งสมดุลที่ไม่เสถียรและมีแนวโน้มที่จะตีลังกาและกระโดดขึ้นจากน้ำด้วยความเร่ง แรงลอยตัวที่กระทำทางด้านซ้ายของแกน OY จะลดลงอย่างรวดเร็ว และทางด้านขวา แรงลอยตัวสูงสุด เท่ากับน้ำหนักของน้ำที่ถูกแทนที่ในปริมาตรครึ่งหนึ่งของหน้าตัดของการลอย ทำหน้าที่ตลอด การหมุนทั้งหมดของการลอยจากตำแหน่งเริ่มต้นถึงมุม O = 90 o เมื่อหมุนเป็นมุม O=90 o แรงลอยตัวทางด้านซ้ายจะเท่ากับ 0 และเริ่มจากมุม = 90 o แรงลอยตัวทางด้านขวาจะลดลงและกลายเป็น = 0 เมื่อพื้นผิวด้านหลัง 19 ไม่ ไปถึงแกน OX ที่ด้านตรงข้ามของแกน OY ทั้งหมดนี้เกิดขึ้นทันที ด้วยการเร่งความเร็ว ทุ่นจะโผล่ขึ้นมาจากน้ำอย่างสมบูรณ์ด้วยความเร่ง เอฟเฟกต์นี้ถูกสร้างขึ้นเนื่องจากรูปร่างของการลอย ในระหว่างการเลี้ยว ด้านซ้ายของทุ่นจะข้ามตำแหน่งสมดุลที่ไม่เสถียรอย่างต่อเนื่อง และในขณะเดียวกันก็ "เพิ่ม" ปริมาตรทางด้านขวา เพื่อชดเชยการลอยที่ออกจากน้ำอย่างสมบูรณ์ตลอดการเลี้ยวผ่านมุมของ 90 o และรักษาขนาดของแรงลอยตัวทางด้านขวาไว้ จากกลไกเป็นที่รู้กันว่าเมื่อมีแรงกระทำต่อร่างกายอย่างต่อเนื่อง ร่างกายจะเคลื่อนที่ด้วยความเร่ง แต่การหมุนลูกลอยอย่างกะทันหันนั้นในตอนแรกถูกขัดขวางโดยแรงเฉื่อยและความต้านทานของระบบขับเคลื่อนของเพลา, เกียร์, กระปุกเกียร์และเครื่องกำเนิดไฟฟ้าซึ่งเพิ่งเริ่มหมุนช้าๆ เนื่องจากการทำงานพร้อมกันหลายลูก จึงมีการสร้างแรงบิดเพียงพอในการหมุนเพลา ในตอนแรก ความเร็วในการหมุนของเพลาจะน้อยกว่าความเร็วการหมุนของทุ่นซึ่งจะมีเมื่อกลิ้งไปมา ลูกลอยจะกระทำบนเพลาและหมุนด้วยความเร็วของเพลา ในขณะเดียวกัน พวกเขาไม่มีเวลาที่จะออกจากน้ำจนหมดเมื่อระดับคลื่นเริ่มลดลง และตัวลอยจะกลับสู่ตำแหน่งเดิม เพลายังคงหมุนต่อไปเนื่องจากความเฉื่อยและความจริงที่ว่าทุ่นอื่น ๆ กระทำต่อเพลาเหล่านั้น และไม่ได้ป้องกันไม่ให้ทุ่นก่อนหน้ากลับสู่ตำแหน่งเดิมเนื่องจากมีคลัตช์ที่โอเวอร์รันหรือกลไกวงล้อ ในขณะที่ทุ่นบางตัวกำลังเดินเบาอยู่บนเพลา ทุ่นอื่น ๆ กำลังสร้างจังหวะแบบแอคทีฟ และทุ่นอื่น ๆ อยู่ในสถานะตรงกลาง เมื่อความเร็วของเพลาเพิ่มขึ้น ลูกลอยจะเพิ่มความเร็วในการหมุนของเพลา ในกรณีนี้ ในแต่ละรอบ ทุ่นจะโผล่ออกมาจากน้ำมากขึ้นเรื่อยๆ และความเร็วของปล่องจะเข้าใกล้ความเร็วของทุ่นที่ลอยอยู่ในสถานะที่เป็นอิสระจากปล่อง ขบวนแห่มีเวลาที่จะโผล่ขึ้นมาจากน้ำจนหมดก่อนที่ระดับคลื่นจะเริ่มลดลงและขึ้นสู่ตำแหน่งสูงสุด ในขณะนี้ พื้นผิวด้านหน้า 15 ของการลอยทำหน้าที่บนจุดหยุดแบบเคลื่อนที่ได้ 20 กดลงและจุ่มลงในน้ำ เมื่อระดับคลื่นลดลง ตัวลอยจะยังคงหมุนไปยังตำแหน่งเดิมตามการลดลงของคลื่น สิ่งนี้อำนวยความสะดวกโดยความแตกต่างในช่วงเวลา M จากน้ำหนักของส่วนที่ยื่นออกมาเชิงปริมาตรและน้ำหนักของน้ำหนักเพิ่มเติม เพลาหมุนด้วยความเร็วสูงกว่าทุ่นซึ่งจะหมุนไปยังตำแหน่งเดิม ในกรณีนี้ เนื่องจากความเฉื่อยของการเคลื่อนที่ ทุ่นจึงเลื่อนผ่านตำแหน่งเดิมและปล่อยตัวหยุดแบบเคลื่อนที่ได้ 20 ซึ่งจะกลับคืนภายใต้การกระทำของสปริงไปยังตำแหน่งเดิม ในเวลานี้ การลอยตัวเนื่องจากความแตกต่างในช่วงเวลา M ทำให้การเคลื่อนที่แบบสั่นกลับไปยังตำแหน่งเดิม และพักกับจุดหยุดแบบเคลื่อนที่ได้ 20 โดยโต้ตอบกับจุดหยุดคงที่ 22 แล้วหยุดในตำแหน่งเดิม จากนั้น กระบวนการนี้จะทำซ้ำสำหรับแต่ละโฟลตด้วยความถี่ของการแพร่กระจายคลื่น ขึ้นอยู่กับความกว้างของคลื่น ยิ่งคลื่นสูง ระยะเวลาก็จะนานขึ้น เมื่อเพลาหมุน เกียร์ 10 ซึ่งติดอยู่กับปลายเอาท์พุทของเพลา จะส่งแรงบิดโดยตรงไปยังเฟืองบนเพลาอินพุตของกระปุกเกียร์ 11 (หรือผ่านเกียร์โอเวอร์ไดรฟ์เพิ่มเติม) จากกระปุกเกียร์ 11 แรงบิดจะถูกส่งไปยังเครื่องกำเนิดไฟฟ้า ในการหมุนของแต่ละเพลาในโรงไฟฟ้าพลังงานคลื่น จะมีช่วงเวลาที่มาจากอิทธิพลของบางอย่าง กลุ่มสุดท้ายลอยตัวเพลาจะเร่งความเร็วจนถึงระดับที่ความเร็วในการหมุนจะเท่ากับความเร็วการหมุนเฉลี่ยของการลอยตัวในระหว่างการตีลังกา ลูกลอยหยุดกระทำบนเพลาครู่หนึ่ง และเพลาเริ่มสูญเสียความเร็วอีกครั้ง ลูกลอยเริ่มทำหน้าที่บนเพลาอีกครั้งและเพิ่มแรงบิดเข้าไป เพลาจะเร่งความเร็วอีกครั้ง จากนั้นจึงช้าลงอีกครั้ง ด้วยวิธีนี้ ความเร็วของการหมุนของเพลาจะถูกรักษาให้ใกล้เคียงกับความเร็วของการหมุนของลูกลอยระหว่างการกลิ้งอย่างอิสระ ในการคำนวณกำลัง N จากโรงไฟฟ้าพลังงานคลื่น จำเป็นต้องคำนวณแรงบิดที่สร้างขึ้นโดยการลอยตัวหนึ่งครั้งก่อน เพื่อให้การคำนวณง่ายขึ้น เราถือว่าพื้นที่อากาศภายในทุ่นเริ่มต้นจากแกนการหมุน กล่าวคือ เราไม่คำนึงถึงการมีอยู่ของดุมล้อและรูลอย (ในกรณีนี้ แรงบิดที่เพิ่มขึ้นเล็กน้อยจากแรงลอยตัวจะได้รับการชดเชยด้วยความจริงที่ว่าการคำนวณจะไม่คำนึงถึงแรงบิดที่สร้างขึ้นจากการลอยตัว แรงที่กระทำต่อปริมาตรที่ยื่นออกมาเมื่อถูกคลื่นท่วม) ลองพิจารณาตำแหน่งปัจจุบันของการลอย (รูปที่ 3) ซึ่งได้หมุนจากตำแหน่งเดิมไปแล้วในมุมหนึ่ง ในกรณีนี้ส่วนที่จมอยู่ใต้น้ำของทุ่น - ครึ่งสูบ - แสดงถึงเซกเตอร์ที่มีมุม 180 o - (เราไม่คำนึงถึงปริมาตรที่ยื่นออกมา) จุดศูนย์กลางมวลของเซกเตอร์ส่วนนี้จะอยู่ที่จุด C ในรัศมีที่แบ่งเซกเตอร์ครึ่งหนึ่งนั่นคือ ที่มุมของภาค ซึ่งทำให้เกิดมุมจากแกน OY การลอยยังถูกกระทำโดยแรงน้ำหนัก P ซึ่งจุดศูนย์ถ่วง C ซึ่งตั้งอยู่ที่รัศมีที่ผ่านไปตามแกนสมมาตรของการลอย (180 o: 2 = 90 o ) ในตำแหน่งเริ่มต้น ซึ่งจะทำให้มุมจากแกน OY ที่ตำแหน่งปัจจุบัน ทราบสูตรจากกลศาสตร์ที่เกี่ยวข้องกับพลังงานจลน์ของการเคลื่อนที่แบบหมุน (T - T o) ที่มุมจาก = 0 ถึงงาน A ดำเนินการระหว่างการหมุนเดียวกันตั้งแต่ 0 ถึง : (T - T o) = A โดยที่
Y sp คือระยะห่างจากแกน O ถึงจุดศูนย์กลางมวลของการลอย h ov คือไหล่จากแรงน้ำหนักของส่วนที่ยื่นออกมาเชิงปริมาตร h d คือไหล่จากแรงน้ำหนักของภาระเพิ่มเติม l คือความยาวของ การลอยตัว R คือรัศมีภายนอกของการลอย โรงไฟฟ้าพลังงานคลื่นประกอบด้วยตัวลอยน้ำที่สร้างขึ้นในรูปแบบของทุ่นแคบ ๆ อย่างน้อยสองตัวโดยเว้นระยะห่างกันในความกว้าง (รูปที่ 1 แสดงทุ่น 3 อัน - 1, 2 และ 3) เชื่อมต่อกันด้วยคาน 4 และ 5 โป๊ะ 1 และ 3 ถูกสร้างขึ้นในรูปแบบของท่อปิดผนึกกลวง และโป๊ะกลาง 2 มีรูปทรงคล้ายกล่องเพื่อรองรับกลไกการขับเคลื่อน บนโป๊ะมีการติดตั้งโครงค้ำยัน 6 ชิ้นพาดขวางและขนานกันโดยวางปลายไว้บนโป๊ะ ตามสะพานลอยแต่ละอัน 6 จะมีการติดตั้งตัวยึด 7 ที่รองรับเพลา 8 แบบโคแอกเชียลจากด้านล่าง ระหว่างส่วนรองรับทั้งหมดของวงเล็บ 6 จะมีการติดตั้งโฟลต 9 บนเพลาโดยมีความเป็นไปได้ในการหมุนทางเดียว หรือกลไกวงล้อ) ลูกลอย 9 ตั้งอยู่ตามลำดับบนเพลาโดยมีช่องว่างปลายน้อยที่สุด ช่วยขจัดปัญหาการติดขัดของลูกลอยในระหว่างการหมุนสัมพัทธ์เนื่องจากอุณหภูมิและการเปลี่ยนรูปของแรง ที่ปลายเอาท์พุทของเพลา 8 มีการติดตั้งเกียร์ 10 ซึ่งอยู่ในตาข่ายโดยตรงกับเกียร์ (ไม่แสดงในรูป) บนเพลาอินพุตของกระปุกเกียร์เร่งความเร็ว 11 หรือผ่านเกียร์เร่งความเร็วเพิ่มเติม (ไม่แสดง ในรูป) เกียร์ 10 ทำหน้าที่เป็นมู่เล่ไปพร้อมกัน เพลาส่งออกของกระปุกเกียร์ 11 แต่ละตัวเชื่อมต่อกับเพลาของเครื่องกำเนิดไฟฟ้า 12 (ติดตั้งกระปุกเกียร์ 11 หากจำเป็น สามารถส่งไปยังเครื่องกำเนิดไฟฟ้าโดยไม่ต้องใช้กระปุกเกียร์) ลูกลอย 9 (ดูรูปที่ 3) ทำขึ้นในรูปของกระบอกสูบกึ่งปิดผนึกกลวง นอกจากนี้ ยังมีส่วนที่ยื่นออกมาตามปริมาตร 13 (เหนือแกน OX) ซึ่งทำในรูปแบบ แต่ละองค์ประกอบ หรืออินทิกรัลกับครึ่งสูบ ดังแสดงในรูป 3 (การยื่นออกมาของปริมาตรทำได้โดยการยืดเส้นรอบวงของกึ่งทรงกระบอกให้ยาวขึ้นเป็นมุมจากแกน OX) และสร้างเซกเตอร์เพิ่มเติม ด้านตรงข้าม มีการติดตั้งน้ำหนักเพิ่มเติม 14 ไว้ภายในลูกลอย เพื่อให้โมเมนต์ที่สร้างขึ้นโดยน้ำหนักของส่วนที่ยื่นออกมาเชิงปริมาตร 13 เท่ากับหรือมากกว่า (ประมาณ 5-10%) มากกว่าโมเมนต์ที่สร้างโดยน้ำหนักเพิ่มเติม 14 และแรงลอยตัวที่กระทำต่อส่วนที่ยื่นออกมา 1 ปริมาตร 13 เมื่อแช่อยู่ในน้ำจะต้องสร้างแรงบิดที่มากกว่าโมเมนต์ที่เกิดจากน้ำหนักของส่วนที่ยื่นออกมาตามปริมาตร ผลกระทบที่วุ่นวายและไม่สมดุลต่อการลอยตัวของน้ำและการไหลของอากาศ และแรงเสียดทานที่กระทำ ในขณะนี้ลูกลอยเริ่มหมุน ส่วนที่ยื่นออกมาของปริมาตร 13 เป็นองค์ประกอบเริ่มต้นที่จะนำการลอยจากสภาวะสมดุลที่ไม่เสถียรไปสู่สถานะที่ไม่สมดุลโดยการหมุนแบบเร่งของทุ่น (ตีลังกา) เมื่อทุ่นจมอยู่ในน้ำจนหมด ขนาดของโรงไฟฟ้าพลังคลื่น จำนวนโป๊ะและโครงลอยที่มีทุ่นขึ้นอยู่กับการกำจัดไฟฟ้าที่วางแผนไว้ ในเวลาเดียวกันเพื่อให้แน่ใจว่าการหมุนของเครื่องกำเนิดไฟฟ้ามีความสม่ำเสมอมากขึ้นตลอดจนเพื่อลดจำนวนกลไกการขับเคลื่อนที่ใช้ (เกียร์ตัวลดเกียร์ข้อต่อ ฯลฯ ) ปลายเอาต์พุตของเพลาที่อยู่ติดกันของโครงขาจะเชื่อมต่อเป็นคู่ หรือมากกว่านั้นโดยเข้าเกียร์ที่ปลายเอาท์พุตของเพลาระหว่างร่วมกับการติดตั้งกระปุกเกียร์ทั่วไป เครื่องกำเนิดไฟฟ้า และเกียร์โอเวอร์ไดรฟ์ และลูกลอยบนเพลาที่เชื่อมต่อกันทางจลนศาสตร์จะอยู่ในตำแหน่งสมมาตรสัมพันธ์กับระนาบที่ผ่านไปตรงกลาง ระยะห่างระหว่างเพลา ในกรณีนี้ เส้นโครงเชิงปริมาตรของการลอยบนเพลาหนึ่งจะอยู่ที่ฝั่งตรงข้ามโดยสัมพันธ์กับตำแหน่งของเส้นโครงเชิงปริมาตรของการลอยบนเพลาอีกอันหนึ่ง การจัดเรียงลูกลอยนี้ช่วยให้เพลาที่เชื่อมต่อทางจลนศาสตร์หมุนไปในทิศทางที่ต่างกัน เมื่อจำนวนโป๊ะมากกว่าสองชิ้น เพื่อให้แน่ใจว่าการหมุนของเครื่องกำเนิดไฟฟ้ามีความสม่ำเสมอมากขึ้น และลดจำนวนกลไกการขับเคลื่อนและเครื่องกำเนิดไฟฟ้าที่ใช้ โครงและเพลาบนโป๊ะที่อยู่ติดกันจะถูกวางไว้ในบรรทัดเดียว ในกรณีนี้ปลายด้านออกของขาหยั่งบนโป๊ะที่อยู่ติดกันจะเชื่อมต่อถึงกัน (โดยใช้ข้อต่อ) โดยใช้เกียร์ทั่วไปหนึ่งอันที่ปลายด้านออกของเพลาอันใดอันหนึ่งเหล่านี้ บูสเตอร์เกียร์ทั่วไป กระปุกเกียร์ทั่วไป และเครื่องกำเนิดไฟฟ้า ( ดังแสดงในรูปที่ 1) เพื่อลดความต้านทานน้ำเมื่อลูกลอยจมอยู่ในน้ำในขณะที่ทำการหมุนจากตำแหน่งบนสุด (หลังตีลังกา) พื้นผิวด้านหน้า 15 ในทิศทางการหมุนของลูกลอยจะทำในรูปแบบของการตีลังกา ลิ่ม (รูปที่. 4) ลูกลอย 8 ถูกติดตั้งบนเพลาโดยมีช่องว่างและส่งแรงบิดไปยังเพลาโดยใช้คลัตช์แบบโอเวอร์รันซึ่งประกอบด้วยช่องว่างโค้งรูปลิ่ม 16 (เกิดจากพื้นผิวโค้ง 17 ของช่องเพลาและพื้นผิวทรงกระบอกของรูลอย ) และนิ้วที่ใส่สปริง 18 ที่ติดตั้งไว้ภายในช่องว่างโค้งรูปลิ่ม 16 เป็นไปได้ที่จะจับคู่การลอยกับเพลาโดยใช้กลไกวงล้อซึ่งประกอบด้วยวงล้อวงล้อที่ยึดอย่างแน่นหนากับเพลาและอุ้งเท้าที่ติดตั้งอยู่บนการลอย (ไม่ใช่ แสดงในรูป) ในกรณีนี้ เพื่อลดความยาวของเพลา แนะนำให้วางล้อวงล้อและอุ้งเท้าไว้ในร่องลูกลอย โดยทำแบบโคแอกเซียลโดยมีรูลูกลอยที่ด้านข้างของปลายด้านหนึ่งหรือสองด้านของลูกลอย เพื่อให้แน่ใจว่าจะรับประกันการคงตัวของทุ่น ณ เวลาที่เกิดคลื่นที่กำลังซัดเข้ามาตั้งแต่โค้งจนกระทั่งถูกน้ำท่วมจนหมด และด้วยเหตุนี้จึงสร้างพลังงานศักย์สูงสุดของทุ่นที่จมอยู่ใต้น้ำ พร้อมทั้งขยายขีดความสามารถทางเทคโนโลยีในแง่ของการขจัดความจำเป็นที่แม่นยำมาก การผลิตลูกลอย ขอแนะนำให้ตรวจสอบให้แน่ใจว่าโมเมนต์ที่สร้างขึ้นโดยน้ำหนักขององค์ประกอบปริมาตร เกินกว่าโมเมนต์ที่สร้างโดยน้ำหนักของโหลดเพิ่มเติมอย่างเห็นได้ชัด ในกรณีนี้ เพื่อป้องกันไม่ให้ทุ่นหมุนไปในทิศทางตรงกันข้ามภายใต้อิทธิพลของความแตกต่างในช่วงเวลานี้ ที่ระดับพื้นผิวด้านหลัง 19 ของทุ่น 9 จะมีการติดตั้งตัวหยุดแบบเคลื่อนที่ได้แบบสปริงโหลด 20 โดยมีการทับซ้อนกันเล็กน้อยของ พื้นผิวด้านหลังของลูกลอย ติดตั้งแบบหมุนได้บนแท่งคงที่ 21 ที่เกี่ยวข้องกับสะพานลอย เหนือจุดหยุดแบบเคลื่อนย้ายได้ 20 จุดหยุดคงที่ 22 จะถูกจับจ้องไปที่แท่งซึ่งตั้งอยู่นอกโซนการหมุนของทุ่นและจับจุดหยุดแบบเคลื่อนย้ายได้ 20 จากการขึ้นด้านบน เนื่องจากเมื่อลูกลอยจมอยู่ในน้ำก่อนที่ปริมาตรที่ยื่นออกมาจะเริ่มท่วม โมเมนต์ที่ไม่สมดุลซึ่งกระทำในทิศทางตรงกันข้ามกับลูกลอยนั้นไม่มีนัยสำคัญ ดังนั้นแรงของการลอยจากด้านล่างบนจุดหยุดแบบเคลื่อนที่ได้ 20 จึงไม่มีนัยสำคัญ ทำให้สามารถทำให้จุดหยุด 20 มีมวลและปริมาตรน้อย และใช้สปริงที่มีแรงอัดเพียงเล็กน้อยได้ ดังนั้นในระหว่างการหมุนการทำงานของทุ่นและผลกระทบต่อจุดหยุดที่เคลื่อนย้ายได้ 20 เมื่อจากด้านบนพวกมันจะหมุนและกระโจนลงไปในน้ำได้อย่างง่ายดายและไม่ให้ความต้านทานต่อการลอยมากนัก ตัวหยุดคงที่ 22 สามารถทำได้โดยตรงในบานพับของตัวหยุดแบบเคลื่อนย้ายได้ 20 ในรูปแบบของตัวจำกัดการหมุนที่รู้จัก หากโมเมนต์ที่สร้างขึ้นโดยปริมาตรที่ยื่นออกมาและโหลดเพิ่มเติมเท่ากัน จะสามารถกำจัดการใช้ตัวหยุดแบบเคลื่อนที่ได้ 20 และตัวหยุดคงที่ 22 ได้ แต่สำหรับสิ่งนี้ จำเป็นต้องตรวจสอบให้แน่ใจว่าปริมาตรทางด้านขวาของการลอยจากแกน OY เพิ่มขึ้นทีละน้อย เช่น โดยค่อยๆ เพิ่มความยาวของการลอย เมื่อทางด้านขวาของทุ่นจมอยู่ในน้ำ แรงลอยตัวจะเกิดขึ้นมากกว่าทางด้านซ้าย ซึ่งจะทำให้รับประกันการหมุนของทุ่นไปทางส่วนที่ยื่นออกมาตามปริมาตร แต่ในกรณีนี้มันเป็นไปไม่ได้ที่จะรับประกันพลังงานศักย์สำรองสูงสุดของการลอยตัวและการหมุนของมันจะเพียงพอต่อการเพิ่มขึ้นของระดับน้ำในคลื่น ตัวถังลอยน้ำนั้นติดตั้งด้วยลวดสลิง 23 ซึ่งสามารถเปลี่ยนความยาวได้ (เช่น การใช้กว้าน) สิ่งนี้ช่วยให้คุณเปลี่ยนตำแหน่งของร่างกายสัมพันธ์กับทิศทางของคลื่นเพื่อให้แน่ใจว่าการโหลดเพลาที่ราบรื่นยิ่งขึ้นด้วยแรงบิดจากการลอยที่อยู่ในมุมหนึ่งไปยังด้านหน้าของคลื่น ตัวเลือกอื่นสำหรับการเปลี่ยนตำแหน่งเชิงมุมของตัวถังสามารถทำได้ เช่น การใช้กระดูกงูอากาศหรือน้ำ ในการควบคุมตำแหน่งของทุ่นที่สัมพันธ์กับระดับน้ำระหว่างการติดตั้งโรงไฟฟ้า ต้องใช้แม่แรงและตัวเว้นระยะที่ส่วนรองรับของโครงค้ำ ในกรณีนี้ ขอแนะนำให้ดำเนินการติดตั้งเพื่อให้แน่ใจว่าตำแหน่งสูงสุดของลูกลอยสัมพันธ์กับระดับน้ำ และปรับร่างตัวถังโดยใช้การสูบน้ำหรือสูบออกในโป๊ะ คุณสามารถใช้โป๊ะเพิ่มเติมได้โดยการยกหรือลดระดับลงไปในน้ำจนถึงระดับความลึกที่กำหนด เพื่อป้องกันอุปกรณ์จากการตกตะกอนและสร้างสภาพภูมิอากาศปกติสำหรับการทำงานของเจ้าหน้าที่ซ่อมบำรุงจึงมีห้องปิด 24 ไว้ โป๊ะรูปกล่อง 2 ปิดที่ด้านบนพร้อมฟัก การดำเนินงานของโรงไฟฟ้าพลังคลื่นมีดังนี้ ในตำแหน่งเริ่มต้นเมื่อไม่มีคลื่น ลอยทั้งหมด 9 จะครองตำแหน่งต่ำสุดตามรูป 3 แม้ว่าพวกมันอาจสัมผัสน้ำหรือไม่ก็ได้ และอาจจมอยู่ในน้ำเล็กน้อยด้วยซ้ำ (จนถึงระดับน้ำซึ่งในระหว่างการใช้งาน ทุ่นที่ตกลงมาจากตำแหน่งบนสุดอย่างอิสระทำให้เกิดช่วงเวลาที่ไม่สมดุลแม้ว่าส่วนหนึ่งของทุ่นจะจมอยู่ใต้น้ำก็ตาม ในน้ำถึงระดับนี้และการลอยจะกลับสู่ตำแหน่งเดิมอย่างอิสระโดยจมอยู่ใต้น้ำบางส่วน ความแตกต่างในช่วงเวลา M จากน้ำหนักของปริมาตรที่ยื่นออกมา 13 และภาระเพิ่มเติม 14 จะกดโฟลต 9 ไปยังจุดหยุดที่เคลื่อนย้ายได้ 20 ซึ่ง จากนั้นจะถูกกดทับกับจุดหยุดคงที่ 22 เมื่อคลื่นก่อตัว "กำลังมา" ที่มุมแหลมกับแกนของเพลา ลูกลอยจะจมอยู่ในน้ำสลับกัน (ถูกน้ำท่วมด้วยคลื่น) ในกรณีนี้ แรงลอยตัว Q เกิดขึ้นเท่ากับน้ำหนักของน้ำในปริมาตรของทุ่นที่จมอยู่ (ตามกฎของอาร์คิมิดีส) เนื่องจากแรงลอยตัวที่กระทำบนทั้งสองด้านของแกน OY มีค่าเท่ากัน แรงลอยตัวที่เกิดขึ้น Q จะเคลื่อนผ่านขึ้นในแนวตั้งผ่านแกนการหมุนของทุ่น และไม่สร้างแรงบิดเมื่อทุ่นลอยจมลงไปจนสุดแกน OX แรงน้ำหนักของการลอย P ก็ผ่านแกน OX เพียงลงด้านล่างเท่านั้น และไม่สร้างแรงบิด ยกเว้นโมเมนต์ M ที่กล่าวข้างต้น ซึ่งสร้างขึ้นโดยความแตกต่างในช่วงเวลาจากน้ำหนักของปริมาตรที่ยื่นออกมา 13 และน้ำหนักของโหลดเพิ่มเติมซึ่งสมดุลโดยปฏิกิริยา R ของส่วนรองรับจากจุดหยุด 20 และ 21 เมื่อลอยจมอยู่เหนือแกน OX ปริมาตรที่ยื่นออกมา 13 จะถูกน้ำท่วมอันเป็นผลมาจากแรงบิดเพิ่มเติมเกิดขึ้น ซึ่งเกินค่าความแตกต่าง M ในช่วงเวลาหนึ่งจากน้ำหนักของปริมาตรที่ยื่นออกมาและน้ำหนักเพิ่มเติม ด้วยเหตุนี้ทุ่นจึงเริ่มหมุนกระโดดข้ามตำแหน่งสมดุลที่ไม่เสถียรและมีแนวโน้มที่จะตีลังกาและกระโดดขึ้นจากน้ำด้วยความเร่ง แรงลอยตัวที่กระทำทางด้านซ้ายของแกน OY จะลดลงอย่างรวดเร็ว และทางด้านขวา แรงลอยตัวสูงสุด เท่ากับน้ำหนักของน้ำที่ถูกแทนที่ในปริมาตรครึ่งหนึ่งของหน้าตัดของการลอย ทำหน้าที่ตลอด การหมุนทั้งหมดของการลอยจากตำแหน่งเริ่มต้นถึงมุม O = 90 o เมื่อหมุนเป็นมุม O=90 o แรงลอยตัวทางด้านซ้ายจะเท่ากับ 0 และเริ่มจากมุม = 90 o แรงลอยตัวทางด้านขวาจะลดลงและกลายเป็น = 0 เมื่อพื้นผิวด้านหลัง 19 ไม่ ไปถึงแกน OX ที่ด้านตรงข้ามของแกน OY ทั้งหมดนี้เกิดขึ้นทันที ด้วยการเร่งความเร็ว ทุ่นจะโผล่ขึ้นมาจากน้ำอย่างสมบูรณ์ด้วยความเร่ง เอฟเฟกต์นี้ถูกสร้างขึ้นเนื่องจากรูปร่างของการลอย ในระหว่างการเลี้ยว ด้านซ้ายของทุ่นจะข้ามตำแหน่งสมดุลที่ไม่เสถียรอย่างต่อเนื่อง และในขณะเดียวกันก็ "เพิ่ม" ปริมาตรทางด้านขวา เพื่อชดเชยการลอยที่ออกจากน้ำอย่างสมบูรณ์ตลอดการเลี้ยวผ่านมุมของ 90 o และรักษาขนาดของแรงลอยตัวทางด้านขวาไว้ จากกลไกเป็นที่รู้กันว่าเมื่อมีแรงกระทำต่อร่างกายอย่างต่อเนื่อง ร่างกายจะเคลื่อนที่ด้วยความเร่ง แต่การหมุนลูกลอยอย่างกะทันหันนั้นในตอนแรกถูกขัดขวางโดยแรงเฉื่อยและความต้านทานของระบบขับเคลื่อนของเพลา, เกียร์, กระปุกเกียร์และเครื่องกำเนิดไฟฟ้าซึ่งเพิ่งเริ่มหมุนช้าๆ เนื่องจากการทำงานพร้อมกันหลายลูก จึงมีการสร้างแรงบิดเพียงพอในการหมุนเพลา ในตอนแรก ความเร็วในการหมุนของเพลาจะน้อยกว่าความเร็วการหมุนของทุ่นซึ่งจะมีเมื่อกลิ้งไปมา ลูกลอยจะกระทำบนเพลาและหมุนด้วยความเร็วของเพลา ในขณะเดียวกัน พวกเขาไม่มีเวลาที่จะออกจากน้ำจนหมดเมื่อระดับคลื่นเริ่มลดลง และตัวลอยจะกลับสู่ตำแหน่งเดิม เพลายังคงหมุนต่อไปเนื่องจากความเฉื่อยและความจริงที่ว่าทุ่นอื่น ๆ กระทำต่อเพลาเหล่านั้น และไม่ได้ป้องกันไม่ให้ทุ่นก่อนหน้ากลับสู่ตำแหน่งเดิมเนื่องจากมีคลัตช์ที่โอเวอร์รันหรือกลไกวงล้อ ในขณะที่ทุ่นบางตัวกำลังเดินเบาอยู่บนเพลา ทุ่นอื่น ๆ กำลังสร้างจังหวะแบบแอคทีฟ และทุ่นอื่น ๆ อยู่ในสถานะตรงกลาง เมื่อความเร็วของเพลาเพิ่มขึ้น ลูกลอยจะเพิ่มความเร็วในการหมุนของเพลา ในกรณีนี้ ในแต่ละรอบ ทุ่นจะโผล่ออกมาจากน้ำมากขึ้นเรื่อยๆ และความเร็วของปล่องจะเข้าใกล้ความเร็วของทุ่นที่ลอยอยู่ในสถานะที่เป็นอิสระจากปล่อง ขบวนแห่มีเวลาที่จะโผล่ขึ้นมาจากน้ำจนหมดก่อนที่ระดับคลื่นจะเริ่มลดลงและขึ้นสู่ตำแหน่งสูงสุด ในขณะนี้ พื้นผิวด้านหน้า 15 ของการลอยทำหน้าที่บนจุดหยุดแบบเคลื่อนที่ได้ 20 กดลงและจุ่มลงในน้ำ เมื่อระดับคลื่นลดลง ตัวลอยจะยังคงหมุนไปยังตำแหน่งเดิมตามการลดลงของคลื่น สิ่งนี้อำนวยความสะดวกโดยความแตกต่างในช่วงเวลา M จากน้ำหนักของส่วนที่ยื่นออกมาเชิงปริมาตรและน้ำหนักของน้ำหนักเพิ่มเติม เพลาหมุนด้วยความเร็วสูงกว่าทุ่นซึ่งจะหมุนไปยังตำแหน่งเดิม ในกรณีนี้ เนื่องจากความเฉื่อยของการเคลื่อนที่ ทุ่นจึงเลื่อนผ่านตำแหน่งเดิมและปล่อยตัวหยุดแบบเคลื่อนที่ได้ 20 ซึ่งจะกลับคืนภายใต้การกระทำของสปริงไปยังตำแหน่งเดิม ในเวลานี้ การลอยตัวเนื่องจากความแตกต่างในช่วงเวลา M ทำให้การเคลื่อนที่แบบสั่นกลับไปยังตำแหน่งเดิม และพักกับจุดหยุดแบบเคลื่อนที่ได้ 20 โดยโต้ตอบกับจุดหยุดคงที่ 22 แล้วหยุดในตำแหน่งเดิม จากนั้น กระบวนการนี้จะทำซ้ำสำหรับแต่ละโฟลตด้วยความถี่ของการแพร่กระจายคลื่น ขึ้นอยู่กับความกว้างของคลื่น ยิ่งคลื่นสูง ระยะเวลาก็จะนานขึ้น เมื่อเพลาหมุน เกียร์ 10 ซึ่งติดอยู่กับปลายเอาท์พุทของเพลา จะส่งแรงบิดโดยตรงไปยังเฟืองบนเพลาอินพุตของกระปุกเกียร์ 11 (หรือผ่านเกียร์โอเวอร์ไดรฟ์เพิ่มเติม) จากกระปุกเกียร์ 11 แรงบิดจะถูกส่งไปยังเครื่องกำเนิดไฟฟ้า ในการหมุนของแต่ละเพลาในโรงไฟฟ้าพลังงานคลื่น จะมีช่วงเวลาที่มาจากอิทธิพลของบางอย่าง กลุ่มสุดท้ายลอยตัวเพลาจะเร่งความเร็วจนถึงระดับที่ความเร็วในการหมุนจะเท่ากับความเร็วการหมุนเฉลี่ยของการลอยตัวในระหว่างการตีลังกา ลูกลอยหยุดกระทำบนเพลาครู่หนึ่ง และเพลาเริ่มสูญเสียความเร็วอีกครั้ง ลูกลอยเริ่มทำหน้าที่บนเพลาอีกครั้งและเพิ่มแรงบิดเข้าไป เพลาจะเร่งความเร็วอีกครั้ง จากนั้นจึงช้าลงอีกครั้ง ด้วยวิธีนี้ ความเร็วของการหมุนของเพลาจะถูกรักษาให้ใกล้เคียงกับความเร็วของการหมุนของลูกลอยระหว่างการกลิ้งอย่างอิสระ ในการคำนวณกำลัง N จากโรงไฟฟ้าพลังงานคลื่น จำเป็นต้องคำนวณแรงบิดที่สร้างขึ้นโดยการลอยตัวหนึ่งครั้งก่อน เพื่อให้การคำนวณง่ายขึ้น เราถือว่าพื้นที่อากาศภายในทุ่นเริ่มต้นจากแกนการหมุน กล่าวคือ เราไม่คำนึงถึงการมีอยู่ของดุมล้อและรูลอย (ในกรณีนี้ แรงบิดที่เพิ่มขึ้นเล็กน้อยจากแรงลอยตัวจะได้รับการชดเชยด้วยความจริงที่ว่าการคำนวณจะไม่คำนึงถึงแรงบิดที่สร้างขึ้นจากการลอยตัว แรงที่กระทำต่อปริมาตรที่ยื่นออกมาเมื่อถูกคลื่นท่วม) ลองพิจารณาตำแหน่งปัจจุบันของการลอย (รูปที่ 3) ซึ่งได้หมุนจากตำแหน่งเดิมไปแล้วในมุมหนึ่ง ในกรณีนี้ส่วนที่จมอยู่ใต้น้ำของทุ่น - ครึ่งสูบ - แสดงถึงเซกเตอร์ที่มีมุม 180 o - (เราไม่คำนึงถึงปริมาตรที่ยื่นออกมา) จุดศูนย์กลางมวลของเซกเตอร์ส่วนนี้จะอยู่ที่จุด C ในรัศมีที่แบ่งเซกเตอร์ครึ่งหนึ่งนั่นคือ ที่มุมของภาค ซึ่งทำให้เกิดมุมจากแกน OY การลอยยังถูกกระทำโดยแรงน้ำหนัก P ซึ่งจุดศูนย์ถ่วง C ซึ่งตั้งอยู่ที่รัศมีที่ผ่านไปตามแกนสมมาตรของการลอย (180 o: 2 = 90 o ) ในตำแหน่งเริ่มต้น ซึ่งจะทำให้มุมจากแกน OY ที่ตำแหน่งปัจจุบัน ทราบสูตรจากกลศาสตร์ที่เกี่ยวข้องกับพลังงานจลน์ของการเคลื่อนที่แบบหมุน (T - T o) ที่มุมจาก = 0 ถึงงาน A ดำเนินการระหว่างการหมุนเดียวกันตั้งแต่ 0 ถึง : (T - T o) = A โดยที่ ![]() ความเร็วของการเคลื่อนที่แบบหมุนอยู่ที่ไหน M - แรงบิด; ฉัน o - โมเมนต์ความเฉื่อย เพื่อกำหนดงาน เรามาสร้างสมการสำหรับแรงบิดกันก่อน สมการของช่วงเวลาที่กระทำต่อการลอยในตำแหน่งปัจจุบัน (เมื่อหมุนที่มุมหนึ่ง) M t = Qh in - Ph p - P ov h ov + P d h d = M การฝึก
ความเร็วของการเคลื่อนที่แบบหมุนอยู่ที่ไหน M - แรงบิด; ฉัน o - โมเมนต์ความเฉื่อย เพื่อกำหนดงาน เรามาสร้างสมการสำหรับแรงบิดกันก่อน สมการของช่วงเวลาที่กระทำต่อการลอยในตำแหน่งปัจจุบัน (เมื่อหมุนที่มุมหนึ่ง) M t = Qh in - Ph p - P ov h ov + P d h d = M การฝึก
เพื่อให้ง่ายขึ้น ช่วงเวลาที่สร้างขึ้นโดยน้ำหนักของส่วนที่ยื่นออกมาเชิงปริมาตรและน้ำหนักของภาระเพิ่มเติมจะไม่ถูกนำมาพิจารณาในการคำนวณเนื่องจากมีขนาดเล็ก นอกจากนี้เรายังไม่คำนึงถึงโมเมนต์จากแรงเสียดทาน ซึ่งเป็นลำดับความสำคัญที่เล็กกว่าโมเมนต์จากแรงลอยตัว สำหรับส่วนที่ทำมุม 180 o -: ![]()
ความถ่วงจำเพาะของน้ำอยู่ที่ไหน
จากที่นี่: 
จากนั้นงาน A ที่สร้างขึ้นโดยการกระทำของแรงลอยตัว Q และน้ำหนักของลูกลอย P ที่มุมการหมุนจาก = 0 (ตำแหน่งเริ่มต้น) ถึง = 180 o (ก่อนที่ลูกลอยจะออกจากน้ำ) จะได้เป็น 
หลังจากการเปลี่ยนแปลงที่เราได้รับ 
หลังจากแก้ไขแล้วเราก็จะได้ ![]()
ในการหากำลัง A/t เราจะกำหนดเวลาการหมุนของลูกลอยผ่านมุมตั้งแต่ 0 o ถึง 180 o จากสมการ T-T o =A หลังจากการทดแทนที่เราได้รับ
ตั้งแต่ที่ 0 = 0 0 = 0 และ ![]()
หลังจากเปลี่ยนตัวเราจะได้ความเท่าเทียมกัน ![]()
![]()
จากที่นี่ 
เนื่องจาก = ดังนั้นสมการยกกำลังจะเป็นดังนี้ 
ลองพิจารณาตัวอย่างการคำนวณกำลังของโรงไฟฟ้าพลังคลื่นซึ่งดำเนินการตามรูปที่ 1 โป๊ะ 1, 2 และ 3: 3 พร้อมโครงและคาน 20 อัน เพลาแต่ละอันมีทุ่น 20 อันทำจากอลูมิเนียมอัลลอยด์ D16T (= 2.7) ขนาดลูกลอย: R = 1 ม.; ล. = 1 ม
ด้วยแผ่นหนา 5 มม. น้ำหนักลูกลอยคือ P = มก. = 70 กก. ก่อนอื่น เรามาคำนวณกำลังของหนึ่งทุ่นกันก่อน ในกรณีนี้ เราจะหาความหนาแน่นจำเพาะของน้ำทะเลเท่ากับ 1,025 กิโลกรัม/ลูกบาศก์เมตร (ขึ้นอยู่กับความหนาแน่นตามเงื่อนไขโดยเฉลี่ย T = 25) จากสมการ (2) ที่เราได้รับ 
โดยที่ 
ก
ด้วยอัตราการก่อตัวของคลื่นเฉลี่ย 5.5 วินาที พลังงานลอยตัวจะเท่ากับ
ยังไม่มีข้อความ = 60.66:5.5 = 11 กิโลวัตต์ ให้เรายอมรับประสิทธิภาพขั้นสุดท้ายของโรงไฟฟ้าพลังงานคลื่นโดยคำนึงถึงประสิทธิภาพของชุดขับเคลื่อนและแรงเสียดทานทั้งหมดรวมถึง น้ำเท่ากับ 0.6 แล้วพลังของโรงไฟฟ้าคลื่น 400 ลูกก็จะเป็น
N s = 11 400 0.6 = 2640 กิโลวัตต์
ในกรณีนี้โรงไฟฟ้าคลื่นจะครอบครองพื้นที่ ![]() . กำลังไฟฟ้าส่งออกจาก 1 ตร.ม. จะเป็น 2,640:800=3.3 กิโลวัตต์/ตร.ม. (เทียบกับกำลังไฟฟ้าในต้นแบบ 1.39 กิโลวัตต์ หรือโรงไฟฟ้าพลังงานคลื่นที่ใช้เฉพาะกังหันอากาศ ซึ่งกำลังไฟฟ้าออก 1 กิโลวัตต์/ตร.ม.) ควรสังเกตว่าด้วยความสูงของคลื่นที่สูงกว่า (เหนือแกน X) แรงลอยตัวจะเพิ่มขึ้นและถึงค่าสูงสุดรวมเมื่อทุ่นถูกน้ำท่วมจากตำแหน่งล่างเริ่มต้นจนถึงความสูง 2R ในกรณีนี้ แรงลอยตัวจะได้รับผลกระทบจากแรงลอยตัวในระหว่างการหมุนของทุ่นไม่ใช่ 180 o แต่เป็นมุม 270 o ในกรณีนี้ นับตั้งแต่วินาทีที่ทุ่นหมุนเป็นมุม 90 o (จากตำแหน่งเริ่มต้น) ลูกลอยจะได้รับผลกระทบจากแรงลอยตัวที่ไม่สมดุลเท่ากับน้ำหนักของน้ำที่แทนที่ในปริมาตรของทุ่นทั้งหมด (เช่น , อีก 2 เท่า) ดังนั้นกำลังไฟฟ้าที่ผลิตได้ของโรงไฟฟ้าพลังงานคลื่นจะสูงกว่าที่กำหนดในการคำนวณอย่างมีนัยสำคัญ ตัวอย่างเช่นการผลิตไฟฟ้า W ต่อปีขึ้นอยู่กับการดำเนินงานของโรงไฟฟ้าพลังคลื่นคือ 2/3 ของกองทุนเวลาประจำปี (เวลาที่เหลือมีความสงบหรือไม่มีคลื่นที่มีความสูงที่ต้องการ) และไม่มี โดยคำนึงถึงคลื่นที่มีความสูงมากกว่าความสูงของส่วนน้ำท่วมของทุ่นด้วยจำนวนปริมาตรที่ยื่นออกมา (ข้อมูลเวลาการทำงานของโรงไฟฟ้าคลื่นจะต้องนำมาจากข้อมูลทางสถิติของการสังเกตการณ์อุตุนิยมวิทยาเฉพาะพื้นที่โดยเฉพาะ) จะ เป็น 15417600 kW/ชั่วโมง = (2/3 264024365) ที่ราคา 1 kW/ชั่วโมง 100 รูเบิล รายได้จากโรงไฟฟ้าจะเท่ากับ 1,541.76 ล้านรูเบิล ในปี ด้วยการใช้พลังงานเฉลี่ย 30 kWh ต่อเดือนต่อประชากร โรงไฟฟ้าพลังคลื่นแห่งนี้จะใช้พลังงาน การตั้งถิ่นฐานมีประชากร 15,417,600: (3,012) = 42,826 คน กล่าวคือ ทั้งเมือง (ไม่นับการบริโภคภาคอุตสาหกรรม) โรงไฟฟ้าพลังคลื่นที่เชื่อมต่อเป็นเครือข่ายพลังงานเดียวจะช่วยลดการผลิตไฟฟ้าจากการเผาไหม้แหล่งเชื้อเพลิงได้อย่างมาก จากการสังเกตการณ์อุตุนิยมวิทยาระยะยาวของคลื่นชายฝั่งในพื้นที่เฉพาะ สามารถสร้างโรงไฟฟ้าพลังงานคลื่นที่มีทุ่นขนาดและตัวเลขต่างกันได้ ในเวลาเดียวกัน จะต้องดำเนินการรวมและต้องกำหนดช่วงขนาดที่เหมาะสมของโรงไฟฟ้า (ซึ่งช่วยลดต้นทุนการผลิต) สามารถติดตั้งสถานีได้ในระยะทางที่แตกต่างจากชายฝั่ง เมื่อพิจารณาถึงความเรียบง่ายของโรงไฟฟ้าพลังคลื่น ค่าใช้จ่ายในการสร้างโรงไฟฟ้าเหล่านี้จะหมดไปภายในหนึ่งปี ตัวอย่างเช่นโรงไฟฟ้าพลังคลื่นที่นำเสนอจะมีการคำนวณรวมของงานการผลิต (ในราคาของต้นปี 2540)
. กำลังไฟฟ้าส่งออกจาก 1 ตร.ม. จะเป็น 2,640:800=3.3 กิโลวัตต์/ตร.ม. (เทียบกับกำลังไฟฟ้าในต้นแบบ 1.39 กิโลวัตต์ หรือโรงไฟฟ้าพลังงานคลื่นที่ใช้เฉพาะกังหันอากาศ ซึ่งกำลังไฟฟ้าออก 1 กิโลวัตต์/ตร.ม.) ควรสังเกตว่าด้วยความสูงของคลื่นที่สูงกว่า (เหนือแกน X) แรงลอยตัวจะเพิ่มขึ้นและถึงค่าสูงสุดรวมเมื่อทุ่นถูกน้ำท่วมจากตำแหน่งล่างเริ่มต้นจนถึงความสูง 2R ในกรณีนี้ แรงลอยตัวจะได้รับผลกระทบจากแรงลอยตัวในระหว่างการหมุนของทุ่นไม่ใช่ 180 o แต่เป็นมุม 270 o ในกรณีนี้ นับตั้งแต่วินาทีที่ทุ่นหมุนเป็นมุม 90 o (จากตำแหน่งเริ่มต้น) ลูกลอยจะได้รับผลกระทบจากแรงลอยตัวที่ไม่สมดุลเท่ากับน้ำหนักของน้ำที่แทนที่ในปริมาตรของทุ่นทั้งหมด (เช่น , อีก 2 เท่า) ดังนั้นกำลังไฟฟ้าที่ผลิตได้ของโรงไฟฟ้าพลังงานคลื่นจะสูงกว่าที่กำหนดในการคำนวณอย่างมีนัยสำคัญ ตัวอย่างเช่นการผลิตไฟฟ้า W ต่อปีขึ้นอยู่กับการดำเนินงานของโรงไฟฟ้าพลังคลื่นคือ 2/3 ของกองทุนเวลาประจำปี (เวลาที่เหลือมีความสงบหรือไม่มีคลื่นที่มีความสูงที่ต้องการ) และไม่มี โดยคำนึงถึงคลื่นที่มีความสูงมากกว่าความสูงของส่วนน้ำท่วมของทุ่นด้วยจำนวนปริมาตรที่ยื่นออกมา (ข้อมูลเวลาการทำงานของโรงไฟฟ้าคลื่นจะต้องนำมาจากข้อมูลทางสถิติของการสังเกตการณ์อุตุนิยมวิทยาเฉพาะพื้นที่โดยเฉพาะ) จะ เป็น 15417600 kW/ชั่วโมง = (2/3 264024365) ที่ราคา 1 kW/ชั่วโมง 100 รูเบิล รายได้จากโรงไฟฟ้าจะเท่ากับ 1,541.76 ล้านรูเบิล ในปี ด้วยการใช้พลังงานเฉลี่ย 30 kWh ต่อเดือนต่อประชากร โรงไฟฟ้าพลังคลื่นแห่งนี้จะใช้พลังงาน การตั้งถิ่นฐานมีประชากร 15,417,600: (3,012) = 42,826 คน กล่าวคือ ทั้งเมือง (ไม่นับการบริโภคภาคอุตสาหกรรม) โรงไฟฟ้าพลังคลื่นที่เชื่อมต่อเป็นเครือข่ายพลังงานเดียวจะช่วยลดการผลิตไฟฟ้าจากการเผาไหม้แหล่งเชื้อเพลิงได้อย่างมาก จากการสังเกตการณ์อุตุนิยมวิทยาระยะยาวของคลื่นชายฝั่งในพื้นที่เฉพาะ สามารถสร้างโรงไฟฟ้าพลังงานคลื่นที่มีทุ่นขนาดและตัวเลขต่างกันได้ ในเวลาเดียวกัน จะต้องดำเนินการรวมและต้องกำหนดช่วงขนาดที่เหมาะสมของโรงไฟฟ้า (ซึ่งช่วยลดต้นทุนการผลิต) สามารถติดตั้งสถานีได้ในระยะทางที่แตกต่างจากชายฝั่ง เมื่อพิจารณาถึงความเรียบง่ายของโรงไฟฟ้าพลังคลื่น ค่าใช้จ่ายในการสร้างโรงไฟฟ้าเหล่านี้จะหมดไปภายในหนึ่งปี ตัวอย่างเช่นโรงไฟฟ้าพลังคลื่นที่นำเสนอจะมีการคำนวณรวมของงานการผลิต (ในราคาของต้นปี 2540)
ทุ่น 3 อันเส้นผ่านศูนย์กลาง 3 ม. ยาว 15-18 ม. 10 ล้าน x 3 = 30 ล้าน
สะพานลอย 20 แห่งพร้อมส่วนรองรับเพลา - 5 ล้าน x 20 = 100 ล้าน
20 เพลา - 5.5 x 20 = 110 ล้าน
ทุ่น 400 ตัวทำจากอลูมิเนียม โลหะผสม (น้ำหนักรวม 30 ตัน) พร้อมคลัตช์แบบโอเวอร์รัน - 0.25 x 400 = 100 ล้าน
5 กระปุกเกียร์ - 25x5 = 125 ล้าน
เครื่องกำเนิดไฟฟ้า 5 เครื่อง - 30x5 = 150 ล้าน
5 เกียร์ 5x5 = 25 ล้าน
อุปกรณ์ไฟฟ้า (ตู้ สายไฟ ฯลฯ) - 20 ล้าน
การติดตั้งสถานี - 150 ล้าน
รวม: 810 ล้านรูเบิล เมื่อเปรียบเทียบกับรายได้ต่อปีที่ 1,541.76 ล้านรูเบิล เราสามารถพูดได้อย่างมั่นใจว่าด้วยการคำนวณต้นทุนนี้ สถานีจะชดใช้ต้นทุนทุนภายในหนึ่งปี ดังนั้น โรงไฟฟ้าคลื่นที่นำเสนอทำให้สามารถแปลงพลังงานจลน์ของคลื่นที่เพิ่มขึ้นเป็นพลังงานศักย์ของแรงลอยตัวที่กระทำต่อตัวลอยได้อย่างมีประสิทธิภาพมากขึ้น โดยการยึดตัวลอยไว้ในตำแหน่งต่ำสุดจนกว่าพวกมันจะจมอยู่ในน้ำจนหมด และ การแปลงพลังงานศักย์นี้เป็นพลังงานจลน์โดยสมบูรณ์ในทันที และเปลี่ยนเป็นการเคลื่อนที่แบบหมุนของการลอยโดยตรง การกำจัดพลังงานจากน้ำ 1 m 2 เพิ่มขึ้น 2-3 เท่า การออกแบบโรงไฟฟ้าพลังคลื่นนั้นง่ายขึ้นเนื่องจากการใช้จลนศาสตร์ องค์ประกอบที่เรียบง่ายซึ่งไม่ต้องการความแม่นยำสูง และการใช้ชิ้นส่วนทั่วไปและผลิตภัณฑ์ที่ซื้อซึ่งเชี่ยวชาญด้านวิศวกรรมเครื่องกล (เกียร์ เพลา คลัตช์โอเวอร์รันและเชื่อมต่อ กระปุกเกียร์ เครื่องกำเนิดไฟฟ้า) ทะเลที่กว้างใหญ่ทำให้เกิดความเป็นไปได้ในการก่อสร้าง ปริมาณมากโรงไฟฟ้าพลังคลื่นดังกล่าวและลดจำนวนโรงไฟฟ้าพลังความร้อนที่เผาผลาญทรัพยากรเชื้อเพลิง สภาพแวดล้อมในสถานที่ผลิตไฟฟ้าได้รับการปรับปรุงให้ดีขึ้น สิ่งแวดล้อม. ผลตอบแทนจากต้นทุนทุนสูง (ภายใน 1-2 ปี) ทำให้การใช้งานมีประสิทธิภาพ ทรัพยากรทางการเงินระหว่างการก่อสร้างโรงไฟฟ้าพลังคลื่นที่เสนอ
การใช้งาน: ไฟฟ้าพลังน้ำ การแปลงพลังงานคลื่นเป็นพลังงานไฟฟ้า สาระสำคัญของการประดิษฐ์: เครื่องกำเนิดคลื่นประกอบด้วยส่วนรองรับ, ตัวเรือนทรงกระบอกแนวตั้งพร้อมฝาปิดและด้านล่างซึ่งมีการสร้างรูรับคลื่น, เช็ควาล์วและตัวแปลงพลังงานคลื่นในรูปแบบของเพลาแนวตั้งอย่างมั่นคง เชื่อมต่อกับฝาครอบตัวเรือนในส่วนล่างของผนังด้านข้างซึ่งมีรูช่องสัมผัสแนวตั้ง มีอะไรใหม่คือการออกแบบมีตัวเครื่องทรงกระบอกแนวตั้งตัวที่สอง เครื่องกำเนิดไฟฟ้า รูรับคลื่น และตัวเครื่องทรงกระบอกแนวตั้งตัวที่สองเชื่อมต่อแบบเคลื่อนย้ายได้กับตัวเครื่องตัวแรกโดยใช้เพลาแนวตั้งที่เชื่อมต่ออย่างแน่นหนากับฝาครอบของตัวเครื่องตัวที่สอง และโรเตอร์วงแหวนแม่เหล็กของเครื่องกำเนิดไฟฟ้าติดตั้งอย่างแน่นหนาบนเพลาและสเตเตอร์เชื่อมต่ออย่างแน่นหนากับด้านล่างของตัวเรือนแรกซึ่งเชื่อมต่อกับส่วนรองรับและรูเจาะรูที่อยู่ในแนวตั้งของตัวเรือนที่สองนั้น หันไปในทิศทางตรงข้ามกับรูเดียวกันของตัวเรือนแรก 3 ป่วย
สิ่งประดิษฐ์นี้เกี่ยวข้องกับพลังงานน้ำและสามารถใช้ได้ในทุกอุตสาหกรรม เศรษฐกิจของประเทศ เพื่อสร้างแหล่งพลังงานเพิ่มเติม รู้จักเครื่องยนต์คลื่นซึ่งประกอบด้วยตัวเรือนแนวตั้งที่มีรูรับคลื่น วาล์ว และเครื่องแปลงพลังงานคลื่น โดยที่ตัวเครื่องมีทรงกระบอกพร้อมฝาปิดและด้านล่าง ด้านล่างมีรูรับคลื่นถูกสร้างขึ้น วาล์ว ทำกลับด้านและติดตั้งในรูตัวแปลงเป็นเพลาแนวตั้งและเชื่อมต่ออย่างแน่นหนากับฝาปิดตัวเรือนในขณะที่ส่วนล่างของผนังด้านข้างของตัวเรือนจะมีรูเจาะรูแนวตั้งที่อยู่ในแนวสัมผัส ข้อเสียของการออกแบบที่ทราบคือประสิทธิภาพต่ำ ผลลัพธ์ทางเทคนิคของการประดิษฐ์คือการเพิ่มประสิทธิภาพ ผลลัพธ์ทางเทคนิคเกิดขึ้นได้จากข้อเท็จจริงที่ว่าในเครื่องกำเนิดคลื่นที่มีตัวเรือนทรงกระบอกแนวตั้งพร้อมฝาปิดและด้านล่างซึ่งมีการสร้างรูรับคลื่นวาล์วตรวจสอบและตัวแปลงพลังงานคลื่นในรูปแบบของเพลาแนวตั้ง เชื่อมต่ออย่างแน่นหนากับฝาครอบตัวเรือนในส่วนล่างของผนังด้านข้างซึ่งมีรูเจาะรูที่อยู่ในแนวสัมผัสในแนวตั้ง มีลักษณะพิเศษที่ประกอบด้วยตัวถังทรงกระบอกแนวตั้งตัวที่สอง เครื่องกำเนิดไฟฟ้า ตัวรองรับ รูรับคลื่น และตัวที่สอง ตัวทรงกระบอกแนวตั้งถูกต่อเข้ากับตัวเครื่องที่หนึ่งอย่างเคลื่อนย้ายได้โดยใช้เพลาแนวตั้งที่ต่ออย่างแน่นหนากับฝาครอบของตัวเครื่องที่สอง และติดอย่างแน่นหนาบนเพลาของโรเตอร์เครื่องกำเนิดไฟฟ้า และสเตเตอร์ต่ออย่างแน่นหนากับด้านล่างของตัวเรือนที่หนึ่ง ซึ่งเชื่อมต่อกับส่วนรองรับ และรูเจาะรูที่อยู่ในแนวสัมผัสแนวตั้งของตัวเรือนที่สองนั้นหันไปในทิศทางตรงข้ามกับรูเดียวกันของตัวเรือนแรก รูปที่ 1 แสดงเครื่องกำเนิดคลื่น รูปที่ 2 และ 3 แสดงส่วนทรงกระบอกที่หนึ่งและที่สองตามลำดับ เครื่องกำเนิดคลื่นประกอบด้วยตัวเรือนทรงกระบอกแนวตั้ง 1 พร้อมฝาปิดและด้านล่างซึ่งมีรูรับคลื่น 2 เช็ควาล์ว 3 และตัวแปลงพลังงานคลื่นในรูปแบบของเพลาแนวตั้ง 4 เชื่อมต่ออย่างแน่นหนากับฝาครอบตัวเรือน ในส่วนล่างของผนังด้านข้างซึ่งมีรูสล็อตที่อยู่ในแนวสัมผัสแนวตั้ง 5 คุณสมบัติที่โดดเด่นหลักคือตัวทรงกระบอกแนวตั้งตัวที่สอง 6 เครื่องกำเนิดไฟฟ้า 7 ตัวรองรับ 8 รูรับคลื่น 9 และตัวที่สอง ตัวทรงกระบอกแนวตั้ง 6 เชื่อมต่อแบบเคลื่อนย้ายได้กับตัวแรก 1 โดยใช้เพลาแนวตั้ง 10 เชื่อมต่ออย่างแน่นหนากับฝาครอบของตัวที่สองและบนเพลา 10 โรเตอร์วงแหวนแม่เหล็ก 11 ของเครื่องกำเนิดไฟฟ้า 7 ติดตั้งอย่างแน่นหนาและ สเตเตอร์ 12 เชื่อมต่ออย่างแน่นหนาที่ด้านล่างของตัวเรือนแรก 1 ซึ่งเชื่อมต่อกับส่วนรองรับ 8 และรูที่มีรูพรุนที่อยู่ในแนวตั้ง 13 ของตัวเรือนที่สอง 6 จะถูกนำไปในทิศทางตรงกันข้ามกับรูเดียวกัน 5 ของรูแรก ที่อยู่อาศัย 1. เครื่องกำเนิดคลื่นได้รับการติดตั้งที่ระดับความลึกหนึ่งและทำงานดังนี้ เมื่อความดันอุทกสถิตเพิ่มขึ้นความดันภายในตัวเรือนแนวตั้ง 1 และ 6 ก็เพิ่มขึ้นเช่นกัน ผ่านเช็ควาล์ว 3 ที่ติดตั้งในช่องรับคลื่น 2 และ 9 น้ำจะไหลเข้าสู่ตัวเรือน 1 และ 6 และส่งผลให้ปริมาตรของ ช่องว่างอากาศที่เกิดขึ้นเมื่อติดตั้งเครื่องกำเนิดไฟฟ้าที่ระดับความลึกและอยู่ในส่วนบนของเรือน 1 และ 6 นอกจากนี้เมื่อความดันอุทกสถิตลดลงภายใต้การกระทำของแรงยืดหยุ่นของอากาศอัด น้ำที่มีแรงปฏิกิริยาจะถูกขับออกมาผ่านวงสัมผัส กำหนดทิศทางของรูสล็อต 5 และ 13 ซึ่งทำให้เกิดการเคลื่อนที่แบบหมุนของตัวเรือน 1 และ 6 และด้วยเหตุนี้โรเตอร์วงแหวนแม่เหล็กของเครื่องกำเนิดไฟฟ้า 11 และสเตเตอร์ 12 และพวกมันหมุนไปในทิศทางตรงกันข้ามกันตั้งแต่นั้นมา รูช่องที่ 5 และ 13 ของเรือน 1 และ 6 ที่มีทิศทางสัมผัสในแนวตั้งนั้นถูกหันไปในทิศทางตรงกันข้ามซึ่งสัมพันธ์กัน ในกรณีนี้ เส้นสนามแม่เหล็กของโรเตอร์ 11 ที่เจาะทะลุสเตเตอร์ที่คดเคี้ยว 12 จะทำให้เกิด EMF ในนั้น หากขดลวดสเตเตอร์ถูกปิดผ่านวงจรภายนอก กระแสจะเกิดขึ้นในวงจรนี้เช่นเดียวกับในขดลวดสเตเตอร์ 12
เรียกร้อง
เครื่องกำเนิดคลื่นที่มีส่วนรองรับ ตัวเรือนทรงกระบอกแนวตั้งพร้อมฝาปิดและด้านล่างซึ่งมีการสร้างรูรับคลื่น เช็ควาล์วและตัวแปลงพลังงานคลื่นที่ทำในรูปแบบของเพลาแนวตั้งที่เชื่อมต่ออย่างแน่นหนากับฝาครอบตัวเรือน ส่วนล่างของผนังด้านข้างซึ่งมีรูช่องสัมผัสแนวสัมผัสแนวตั้ง โดยมีลักษณะเฉพาะคือติดตั้งเครื่องกำเนิดไฟฟ้าและตัวท่อทรงกระบอกแนวตั้งตัวที่สองพร้อมช่องรับคลื่นและรูเจาะที่อยู่ในแนวสัมผัสในแนวตั้ง และตัวที่สองเชื่อมต่อแบบเคลื่อนย้ายได้ ไปที่อันแรกโดยใช้เพลาแนวตั้งเพิ่มเติมที่เชื่อมต่ออย่างแน่นหนากับฝาครอบของตัวที่สอง วงแหวนแม่เหล็กถูกยึดอย่างแน่นหนากับเพลาเพิ่มเติมของโรเตอร์ของเครื่องกำเนิดไฟฟ้าซึ่งสเตเตอร์เชื่อมต่อกับด้านล่างของตัวเรือนแรก เชื่อมต่อกับส่วนรองรับ ในขณะที่รูเจาะของตัวเรือนที่สองนั้นหันไปในทิศทางตรงข้ามกับรูเจาะของตัวเรือนแรก

