G(V,X) silmustega, kuid ilma mitme kaareta defineerib binaarseose X hulgal V. Täielik graaf vastab universaalsele seosele. Suunatamata graafik vastab sümmeetrilisele seosele. Graafi komplement vastab seose täiendile. Kaarte suuna muutmine vastab vastupidisele suhtele.
Digraafid ja binaarsuhted on sama objektide klass, mida kirjeldatakse erinevate vahenditega. Binaarsuhted, funktsioonid on põhilised tööriistad valdava enamuse praktiliste probleemide lahendamiseks kasutatavate matemaatiliste mudelite koostamiseks ning graafikuid saab visualiseerida diagrammi kujul. See seletab erinevat tüüpi diagrammide laialdast kasutamist kodeerimisel ja kujundamisel.
Digraafi (graafi) G tippu b nimetatakse saavutatav U-st siis ja ainult siis, kui U=V või on olemas tee (marsruut), mis ühendab U-d V-ga (U on algtipp, V on lõpptipp). Seega pole digraafi (graafi) tippude hulgal määratletud mitte ainult naabrusseos A, vaid ka ligipääsetavuse seos T.
Kättesaadavuse maatriks T digraafi (graafi) G nimetatakse T 2 n×n, mille elemendid leitakse tingimusest: 1, kui see on saavutatav alates ; 0, kui pole saadaval aadressilt .
Digraafi kui naabrussuhte refleksiivse ja transitiivse sulgemise maatriksi definitsioon.
Graafi G(V,X) tippudes sisse toodud saavutatavuse seos: tipp w on saavutatav tipust v, kui v = w või G-s on tee v-st w. Teisisõnu, ligipääsetavus on külgnemissuhte refleksiivne ja transitiivne sulgemine.
Leidke naabrusmaatriks, transitiivne ja refleksiivne sulgemine.
Ühenduvus graafikutes. Nõrk, ühesuunaline ja tugev ühenduvus digraafides. Ühenduvuse ja tugeva ühenduvuse maatriks. Ühenduvuskomponendid. Tugeva ühenduvuse maatriksi definitsioon, mis põhineb kättesaadavuse maatriksil.
G(V,X) nimetatakse ühendatud kui mõni selle tipp on kättesaadav mis tahes teisest tipust.
Digraafi G(V,X) nimetatakse ühel viisil ühendatud, kui selle mis tahes kahe tipu puhul on vähemalt üks teisest kättesaadav.
Digraafi G(V,X) nimetatakse tugevalt seotud kui mõni selle tipp on mõnest teisest kättesaadav.
Digraafi G(V,X) nimetatakse lõdvalt ühendatud, kui sellele vastav mittedigraaf, mis saadakse kaare orientatsiooni kustutamise tulemusena, on ühendatud.
Digraafi, mis ei ole nõrgalt ühendatud, nimetatakse ebaühtlane.
Tugeva sidemega komponent digraafi G(V,X) nimetatakse selle digraafi maksimaalseks, tippude esinemiste arvu järgi tugevalt seotud alamgraafiks. Sarnaselt määratletakse ka mittedigraafi ühendatud komponent.
Tugeva ühenduvuse maatriks (ühenduvus) digraafi (graafiku) G(V,Х) nimetus on S n×n, mille elemendid leitakse tingimusest: 1, kui see on ligipääsetav alates ja saavutatav alates ; 0, kui ei ole ligipääsetav alates ja ei ole kättesaadav alates .
(digraaf) tugevalt seotud või ühendatud, piisab, kui määrata 0 olemasolu maatriksis, kui
0 puudub, siis on graafik (digraaf) ühendatud (tugevalt seotud), muidu mitte.
Tugevalt seotud maatriksi saab konstrueerida ligipääsetavusmaatriksist valemiga
Käsitletakse digraafide ligipääsetavuse küsimusi ning ligipääsetavuse ja vastusaadavuse maatriksi leidmise meetodeid. Maatriksmeetodit kaalutakse graafiku mis tahes tippude vaheliste teede arvu leidmiseks, samuti tippude paari vahelises tees sisalduvate tippude hulga leidmiseks. Loengu eesmärk: Anda aimu ligipääsetavusest ja vastusaadavusest ning nende leidmisest
Kättesaadavus ja vastusaadavus
Ülesanded, milles mõistet kasutatakse ligipääsetavus, üsna vähe.
Siin on üks neist. Graafik võib olla mõne organisatsiooni mudel, milles inimesi esindavad tipud ja kaared tõlgendavad suhtluskanaleid. Sellist mudelit vaadeldes võib küsida, kas ühelt inimeselt i saabunud infot saab teisele inimesele j üle kanda, st kas tippudest i tippudesse j viib tee. Kui selline tee on olemas, siis ütleme, et tipud j saavutatav tippudest i . Tippude j saavutatavus tippudest i võib huvitada ainult teedel, mille pikkused ei ületa etteantud väärtust või mille pikkus on väiksem kui ülesande suurim tippude arv vms.
Haaratavust graafis kirjeldab ligipääsetavusmaatriks R=, i, j=1, 2, ... n, kus n on graafi tippude arv ja iga element on defineeritud järgmiselt:
r ij =1, kui tipud j on kättesaadavad punktist x i,
r ij = 0, muidu.
Graafi G tippude hulk R(x i), mis on saavutatav antud tipust x i, koosneb elementidest x i, mille (i, j)-s element saavutatavusmaatriksis on võrdne 1-ga. Ilmselgelt on kõik diagonaalid elemendid maatriksis R on võrdsed 1-ga, kuna iga tipp on iseendast ligipääsetav teekonna pikkusega 0. Kuna esimest järku vahetu vastendus Г +1 (x i) on selliste tippude hulk x j, mis on saavutatavad x i-st kasutades teed pikkusega 1, siis hulk Г + (Г +1 (x i)) = Г +2 (x i) koosneb tippudest, mis on saavutatavad punktist x i, kasutades teid pikkusega 2. Samamoodi on r+p (x i) hulk tipud, mis on saavutatavad punktist x i, kasutades teid pikkusega p.
Kuna iga graafi tipp, mis on saavutatav punktist x i, peab olema saavutatav, kasutades 0 või 1, või 2, ... või p pikkust (või radu), võib tipu x i jaoks saavutatavate tippude komplekti esitada järgmiselt.
R (x i) = ( x i ) G +1 (x i) G +2 (x i) ... G + p (x i).
Nagu näete, on saavutatavate tippude hulk R(x i) tipu x i otsene transitiivne sulgemine, st R(x i) = T + (x i). Seetõttu leiame kättesaadavuse maatriksi koostamiseks kõigi tippude x i X jaoks kättesaadavad hulgad R(x i). Seade r ij =1, kui x j R(x i) ja r ij =0 muidu.
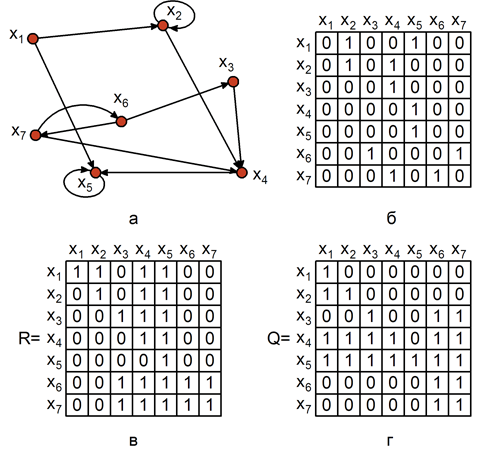
Riis. 4.1. Jõudavus graafikus: a -graaf; b – naabrusmaatriks; c – kättesaadavuse maatriks; r on vastusaadavuse maatriks.
Joonisel fig. 4.1, a, ligipääsetavad komplektid asuvad järgmiselt:
R (x 1 ) = ( x 1 ) ( x 2 , x 5 ) ( x 2 , x 4 , x 5 ) ( x 2 , x 4 , x 5 ) = ( x 1 , x 2 , x 4 , x 5 ) ),
R (x 2 ) = ( x 2 ) ( x 2 , x 4 ) ( x 2 , x 4 , x 5 ) ( x 2 , x 4 , x 5 ) = ( x 2 , x 4 , x 5 ),
R (x 3 ) = ( x 3 ) ( x 4 ) ( x 5 ) ( x 5 ) = ( x 3 , x 4 , x 5 ),
R (x 4 ) = ( x 4 ) ( x 5 ) ( x 5 ) = ( x 4 , x 5 ),
R (x 5 ) = ( x 5 ) ( x 5 ) = ( x 5 ),
R (x 6 ) = ( x 6 ) ( x 3 , x 7 ) ( x 4 , x 6 ) ( x 3 , x 5 , x 7 ) ( x 4 , x 5 , x 6 ) = ( x 3 , x ) 4, x 5, x 6, x 7),
R (x 7 ) = ( x 7 ) ( x 4 , x 6 ) ( x 3 , x 5 , x 7 ) ( x 4 , x 5 , x 6 ) = ( x 3 , x 4 , x 5 , x 6 ) , x 7).
Kättesaadavuse maatriks on joonisel fig. 4.1, c. Kättesaadavuse maatriks saab ehitada vastavalt naabrusmaatriks(joonis 4.1b), moodustades iga tipu x i jaoks hulgadT + (x i).
Vastupääsetavuse maatriks Q = [ q ij ],i, j =1, 2, ... n, kus n on graafi tippude arv, on defineeritud järgmiselt:
q ij =1, kui tipust x j on võimalik jõuda tippu x i ,
q ij = 0, muidu.
vastusaadav hulk Q (x i) on selline tippude hulk, et selle hulga mis tahes tipust on võimalik jõuda tippu x i . Sarnaselt saavutatava hulga R (x i) konstruktsioonile saame kirjutada avaldise Q (x i):
Q (x i) = ( x i ) Г -1 (x i) Г - 2 (x i) ... Г -p (x i).
Seega on selge, et Q (x i) pole midagi muud kui tipu x i pöördtransitiivne sulgemine, st Q (x i) = T - (x i). Definitsioonidest on ilmne, et maatriksi Q veerg x i (milles q ij =1, kui x j Q (x i) ja q ij =0 muidu) langeb kokku maatriksi R reaga x i, st Q = R T , kus RT on ülekantud maatriks kättesaadavuse maatriks R.
Vastupääsetavuse maatriks näidatud joonisel fig. 4,1, g.
Tuleb märkida, et kuna maatriksite R ja Q kõik elemendid on võrdsed 1 või 0-ga, saab iga rida salvestada binaarsel kujul, säästes arvuti mälukulusid. Maatriksid R ja Q on arvutis töötlemiseks mugavad, kuna arvutuslikust seisukohast on peamised toimingud kiired loogilised toimingud.
Teele kaasatud tippude hulga leidmine
Kui teil on vaja teada nendes teedes sisalduvate graafi tippude kohta, peaksite meeles pidama otsese ja pöördtransitiivse sulgemise määratlusi. Kuna T + (x i) on tippude hulk, milleni on teed tipust x i ja T - (x j) on tippude hulk, kust on teed x j , siis T + (x i) T - (x j) ) on tippude hulk, millest igaüks kuulub vähemalt ühele teele, mis kulgeb punktist x i kuni x j. Neid tippe nimetatakse kahe lõpptipu x i ja x j suhtes olulisteks või integraalideks. Graafi kõiki teisi tippe nimetatakse ebaolulisteks või üleliigseteks, kuna nende eemaldamine ei mõjuta teid x i-st x j-ni.

Riis. 4.2. digraaf
Nii et joonisel fig. 4.2 teekonnas sisalduvate tippude leidmine, näiteks tipust x 2 kuni tipuni 4, taandatakse T + (x 2) \u003d ( x 2, x 3, x 4, x 5, x 6 ) leidmiseks,
T - (x 4) \u003d ( x 1, x 2, x 3, x 4, x 5) ja nende lõikepunktid T + (x 2) T - (x 4) \u003d ( x 2, x 3, x 4 x 5).
Maatriksmeetod graafikutes teede leidmiseks
Külgnevusmaatriks määrab täielikult graafiku struktuuri. Paneme külgnemismaatriksi ruudu matemaatika reeglite järgi. Maatriksi A 2 iga element määratakse valemiga
a (2) ik = n j=1 a ij a jk
Valemis olev liige on võrdne 1-ga siis ja ainult siis, kui mõlemad arvud a ij ja a jk on võrdsed 1-ga, vastasel juhul on see võrdne 0-ga. Kuna võrdus a ij = a jk = 1 eeldab pikkusega tee olemasolu 2 tipust x i tippudesse k, mis läbivad tippu x j , siis on maatriksi A 2 element (i -th,k-s) võrdne 2 pikkusega teede arvuga, mis lähevad punktist x i punkti k .
Tabelis 4.1a on näidatud joonisel fig. 4.2. Külgnevusmaatriksi A 2 kvadratuurstamise tulemus on näidatud tabelis 4.1b.

Nii et "1", mis seisab teise rea ja neljanda veeru ristumiskohas, näitab ühe tee olemasolu pikkusega 2 tipust x 2 tippudeni 4. Tõepoolest, nagu me näeme veerg joonisel fig. 4.2, on selline tee: a 6 , a 5 . "2" maatriksis A 2 näitab kahe tee olemasolu pikkusega 2 tippudest 3 tippudesse 6: a 8 , a 4 ja a 10 , a 3 .
Sarnaselt kolmanda astmeni A 3 tõstetud naabrusmaatriksi puhul (tabel 4.1c) on a (3) ik võrdne 3 pikkusega teede arvuga, mis lähevad punktist x i kuni x k . Maatriksi A 3 neljandast reast on näha, et on olemas teed pikkusega 3: üks x 4 in 4 (a 9 , a 8 , a 5), üks x 4 in 4
x 5 (a 9, a 10, a 6) ja kaks teed x 4-st 6-s (a 9, a 10, a 3 ja a 9, a 8, a 4). Maatriks A 4 näitab 4 pikkusega radade olemasolu (tabel 4.1d).
Seega, kui p ik on maatriksi A p element, siis p ik on võrdne teede (mitte tingimata või ahelate või lihtsate või ahelate) arvuga, mille pikkus on x i kuni x k.
JÕUTAVUS JA ÜHENDUS GRAAFIDELT Loengu konspekt: Keti ja tsüklite teed. Graafiline ühenduvus ja ühenduvuskomponendid. Graafiku läbimõõt, raadius ja keskpunkt.
Jagage tööd sotsiaalvõrgustikes
Kui see töö teile ei sobi, on lehe allosas nimekiri sarnastest töödest. Võite kasutada ka otsingunuppu
Baranov Viktor Pavlovitš Diskreetne matemaatika. 3. jaguGraafikud, võrgud, koodid.
8. loeng
8. loeng JÕUTAVUS JA ÜHENDUS GRAAFIKUTES
Loengu kava:
- Marsruudid, ketid ja tsiklid.
- Graafiline ühenduvus ja ühenduvuskomponendid.
- Graafiku läbimõõt, raadius ja keskpunkt.
- Kättesaadavuse ja vastusaadavuse maatriksid.
- Marsruudid, ahelad ja ahelad
Orienteeritud marsruut(või poolt digraafi ) on kaarejada, milles mis tahes muu kaare lõpptipp peale viimase on järgmise kaare algustipp. Joonisel fig. 1 kaare jada
, (1)
, (2)
(3)
on teed.
Riis. üks.
orienteeritud kett(või orepio ) nimetatakse teeks, millel iga kaar ja Koos kasutatud mitte rohkem kui üks kord. Näiteks teed (2) ja (3) on oraketid, kuid tee (1) mitte, kuna kaare kasutatakse selles kaks korda.
Lihtne nimetatakse ahelaks, milles iga tippu kasutab maksimaalselt üks umbes korda. Näiteks orchain (3) on lihtne, kuid orchain (2) mitte.
Tee on tee suunamata kaksik, st servade jada, milles iga serv, välja arvatud esimene ja viimane, on otsatippude kaudu ühendatud servadega ja. Kaare sümboli kohal olev riba tähendab, et seda käsitletakse servana.
Nii nagu oleme määratlenud orketid ja lihtsad ahelad, saame defineerida ka ahelaid ja lihtsaid ahelaid.
Tee või marsruut võib olla esindatud ka tippude jadaga. Näiteks ja mõõdud, tee (1) võib kirjutada järgmiselt: .
Rada nimetatakse suletuks , kui selles kaare algtipp langeb kokku hobusega h noa kaare tipp. Suletud orkete (ahelaid) nimetatakse võirattad (tsüklid ). Orcycle nimetatakse ka kontuurid . Suletud lihtsad orahelad (ahelad) nn s lihtsad orrattad(tsüklid). suletud marsruuton orienteerimata n kinnine topelt sinu juures.
- Graafiku ühenduvus ja ühenduvuse komponendid
Öeldakse, et digraafi tipp on tipust ligipääsetav, kui tee on olemas. Kui pealegi on see saavutatav, siis öeldakse, et need tipud on vastastikku kättesaadavad.
Digraafi nimetatakse tugevalt ühendatud või tugevaks , kui selles on kaks tippu a imo saavutatav. Tugeva digraafi näide on näidatud joonisel fig. 2 a. Kuna veerus e kui on antud ortsükkel, mis sisaldab kõiki tippe, siis võetakse neist suvalised kaks kuid saavutatav.
° ° °
° ° ° ° ° °
° ° ° ° ° °
a B C
Riis. 2.
Digraafi nimetatakseühel viisil ühendatud või ühepoolne kui mõnes selle tipupaaris on vähemalt üks teisest kättesaadav. Ühesuunalise graafiku näide on näidatud joonisel fig. 2 b. Sellel graafikul on ortsükkel, mis sisaldab nelja vastastikku saavutatavat tippu. Tipu sisenemisaste on null, mis tähendab, et sellesse tippu ei vii ühtegi teed. Veelgi enam, mis tahes ülejäänud neljast tipust on sellest kättesaadav.
Digraafi nimetatakse lõdvalt ühendatud või nõrk , kui see sisaldab kahte tippu umbes poolel teel ühinenud . Poolteel, erinevalt teest, võib olla vastupidine suund. sisse laisad kaared. Nõrga digraafi näide on näidatud joonisel fig. 2 tolli On ilmne, et graafik ei sisalda juures ty tippude ja vahel, kuid on olemas pooltee, mis koosneb vastandarvust n a valitsesid kaared ja.
Kui mõne tipupaari puhul pole neid ühendavat marsruuti, siis t a millist digraafi nimetatakse ebaühtlane.
Digraafi jaoks on määratletud kolme tüüpi ühendatud komponente:tugev komponent ma k tugevaim alamgraaf,ühepoolne komponentmaksimaalne üksik umbes ronny alamgraaf janõrk komponentmaksimaalselt nõrk alamgraaf.
Tugeva komponendi kontseptsioon on illustreeritud joonisel fig. 3.
° ° ° ° ° °
° ° ° °
° ° ° ° ° °
° ° ° ° ° °
° ° °
° ° ° ° °
Riis. 3
Ühesuunaliselt ühendatud graafik sisaldab kuut tugevat d graafikud, millest ainult ja on tugevad komponendid n tami. Ühesuunalise komponendi kontseptsiooni illustreeritakse sarnaselt. Selles märkuses e Ühesuunaline komponent on sama, mis graafik ise. Kui muudame orientatsiooni a kaar näiteks vastupidisele, siis saame nõrga graafiku kahe ühepoolsega umbes frontaalkomponendid, millest ühe moodustavad tipud ja teise ve r rehvid.
Suunamata graafi jaoks määratleme selle tippude hulgas bin R seos, eeldades, et on olemas ahel, mis lingib. See suhe on a annab refleksiivsuse, sümmeetria ja transitiivsuse omadused ehk see on umbes t kandmise ekvivalent. See jagab tippude hulga mittelõikuvateks klassideks: . Kaks sama klassi tippu on samaväärsed, st graafis on ahel, mis neid ühendab, erinevatest klassidest pärit tippude jaoks sellist ketti pole. Alates aasta lõpust Yu Kui servad on suhtes, siis jagatakse graafi servade hulk ka mittelõikuvateks klassideks: , kus kõigi servade hulk, mille otsad kuuluvad, on tähistatud .
Graafikud on omavahel ühendatud ja nendest saadakse graafik. Neid graafikuid nimetatakseühenduvuskomponendidgraafik. Arv on graafiku teine arvuline tunnus. Ühendatud graafiku puhul, kui graafik on lahti ühendatud, siis.
Kui antud graaf ei ole ühendatud ja jaguneb mitmeks komponendiks, saab selle graafikuga seotud mis tahes küsimuse lahendamise reeglina taandada üksikute ühendatud komponentide uurimisele. Seetõttu on enamikul juhtudel mõttekas eeldada, et antud graaf on seotud.
- Diameeter, raadius ja graafiku keskpunkt
Ühendatud graafiku jaoks määratleme vahemaa selle kahe tipu vahel ja neid tippe ühendava lühima ahela pikkusena ning tähistatakse tähisega. Keti pikkus on keti moodustavate servade arv. Sisenemist on lihtne kontrollida n See kaugus vastab meetrika aksioomidele:
2) ;
3) .
Määrake kaugus graafiku igast tipust kõige kaugema tipuni
mida nimetatakseekstsentrilisus. On ilmne, et terve graafiku kõigi tippude ekstsentrilisus on võrdne ühega ja lihtsa tsükli tippude puhul .
Maksimaalset ekstsentrilisust nimetatakse läbimõõt graafik ja miinimum raadius graafik. Täielikus graafikus on meil olemas ja lihtsas tsüklis .
Tipu nimetatakse keskseks, kui. Graafikul võib olla mitu b sellised tipud ja mõnes graafis on kõik tipud kesksed. Lihtsas ahelas, kus on paaritu arv tippe, on ainult üks keskne ja paaritu arvuga neist Koos selliseid tippe on kaks. Tervikgraafikus ja lihtsas tsüklis on kõik tipud kesksed. Kesktippude hulka nimetatakse graafiku keskpunkt.
Näide 1 Leidke joonisel fig. näidatud graafiku läbimõõt, raadius ja keskpunkt. neli.
° °
° ° °
° °
° °
Riis. neli.
Selle probleemi lahendamiseks on mugav eelarvutaminekaugusmaatriks tippude vahel mi loe. Sel juhul on see suuruse maatriks, milles kaugus tipust tipuni on paigas:
Iga maatriksi rea jaoks leiame suurima elemendi ja kirjutame selle üles a wa kriipsilt. Suurim neist arvudest võrdub graafiku läbimõõduga, väikseim p a graafiku dius. Graafi keskpunkti moodustavad kesktipud ja.
Optimismi probleemidega seoses tekkisid graafiku kesktipu ja keskpunkti mõisted. ja avalike teeninduspunktide (nt haiglad, tuletõrjeosakonnad, avaliku korra punktid jne) väikesed asukohad, kui on oluline minimeerida ja suurem vahemaa mõne võrgu mis tahes punktist lähima teeninduspunktini a niya.
- Kättesaadavuse ja vastusaadavuse maatriksid
Kättesaadavuse maatrikson määratletud järgmiselt:
Antud tipust saavutatav graafitippude hulk koosneb nendest elementidest, mille maatriksi th element on võrdne 1-ga. Seda hulka saab esitada kui
Vastupääsetavuse maatriks (pöördvõrdeline ligipääsetavus) määratleda on järgmine:
Sarnaselt ligipääsetava komplekti konstrueerimisega saab moodustada komplekti umbes žest, kasutades järgmist väljendit:
Definitsioonidest järeldub, et maatriksi -ndas veerg langeb kokku ma -nda reaga t , st kus on maatriks maatriksisse transponeeritud.
Näide 2 Leia graafiku jms jaoks ligipääsetavuse ja vastusaadavuse maatriksid. ja näidatud joonisel fig. 5.
Riis. 5.
Määratleme graafiku tippude juurdepääsetavuse komplektid:
Seetõttu on ligipääsetavuse ja vastusaadavuse maatriksitel järgmine kuju:
Kuna on hulk selliseid tippe, millest igaüks kuulub vähemalt ühele teele, mis kulgeb punktist kuni, siis selle hulga tippe nimetatakse on hädavajalikud või võõrandamatud lõpptippude suhtes ja. Kõiki teisi tippe nimetataksetähtsusetu või üleliigne , kuna nende eemaldamine ei mõjuta teid kohast kuni.
Samuti saate määratleda maatriksid piiratud ligipääsetavus ja vastusaadavus ja sillad, kui nõuame, et teede pikkused ei ületaks teatud arvu. Siis on lubatud radade pikkuse ülempiir.
Väidetavalt on graafik transitiivne kui kaare olemasolust ja jäljest juures on olemas kaare olemasolu.transitiivne sulgemineGraaf on graafik, kus on minimaalne võimalik kaarekogum, mis on vajalik, et graafik oleks transitiivne. Kui panna maatriksi põhidiagonaalile ühikud, on ilmne, et graafiku ligipääsetavusmaatriks langeb kokku graafiku naabrusmaatriksiga.
Kättesaadavuse graafik
Üks esimesi küsimusi, mis graafide uurimisel üles kerkib, on teede olemasolu antud või kõigi tipupaaride vahel. Vastus sellele küsimusele on ülaltoodud graafiku G=(V,E) tippude saavutatavuse seos: tipp w on saavutatav tipust v, kui v = w või G-s on tee v-st w. Teisisõnu, saavutatavusseos on seose E refleksiivne ja transitiivne sulgemine. Suunatamata graafikute puhul on see seos samuti sümmeetriline ja on seetõttu tippude hulga V ekvivalentsuhe. Suunamata graafis on ligipääsetavuse samaväärsuse klassid nimetatakse ühendatud komponentideks. Suunatud graafikute puhul ei pea ligipääsetavus üldiselt olema sümmeetriline seos. Vastastikune kättesaadavus on sümmeetriline.
Definitsioon 9.8. Suunatud graafi G=(V,E) tipud v ja w on vastastikku saavutatavad, kui G-l on tee v-st w-ni ja tee w-st v-ni.
On selge, et vastastikune ligipääsetavuse seos on refleksiivne, sümmeetriline ja transitiivne ning seega graafiku tippude kogumi ekvivalentsus. Vastastikuse kättesaadavuse ekvivalentsusklasse nimetatakse tugevalt seotud komponentideks või kahekordselt ühendatud komponendid graafik.
Vaatleme esmalt ligipääsetavuse seose konstrueerimise küsimust. Määratleme iga graafi jaoks selle ligipääsetavuse graafiku (mida mõnikord nimetatakse ka transitiivseks sulgemisgraafikuks), mille servad vastavad algse graafi teedele.
Definitsioon 9.9. Olgu G=(V,E) suunatud graaf. G saavutatavusgraafikul G * =(V,E *) on sama tippude komplekt V ja järgmine servade komplekt E * =( (u, v) | graafis G on tipp v tipust kättesaadav u).
Näide 9.3. Vaatleme näite 9.2 graafikut G.
Riis. 9.2. krahv G
Seejärel saame kontrollida, et G-ga saavutatavusgraafik G* näeb välja selline (uusi ahela servi igas tipus 1-5 ei kuvata):

Riis. 9.3. Loenda G*
Kuidas saab graafikust G koostada graafi G *? Üks võimalus on määrata graafi G igale tipule temast ligipääsetav tippude hulk, lisades sellele järjestikku 0, 1, 2 jne pikkuste radade kaudu ulatuvad tipud.
Vaatleme teist meetodit, mis põhineb graafiku G naabrusmaatriksi A G ja Boole'i operatsioonide kasutamisel. Olgu tippude hulk V=(v 1 , … , v n ). Siis on maatriks A G n × n Boole'i maatriks.
Allpool, et säilitada sarnasus tavaliste maatriksitehtetega, kasutame Boole'i operatsioonide jaoks "aritmeetilist" tähistust: disjunktsiooni tähistame + ja konjunktsiooni ·-ga.
Tähistame E n-ga identsusmaatriksit suurusega n × n. Paneme ![]() . Meie protseduur G * konstrueerimiseks põhinegu järgmisel väitel.
. Meie protseduur G * konstrueerimiseks põhinegu järgmisel väitel.
Lemma 9.2. Laske . Siis
Tõestus teostame k induktsiooniga.
Alus. Kui k=0 ja k=1 on väide definitsiooni järgi tõene ja .
induktsiooni samm. Kehtigu lemma k kohta. Näitame, et see jääb kehtima ka k + 1 korral. Definitsiooni järgi on meil:
Oletame, et graafikus G punktist v i kuni v j on tee pikkusega k+1. Kaaluge lühimat neist teedest. Kui selle pikkus on k, siis induktsioonihüpoteesi järgi a_(ij)^((k))=1. Lisaks a jj (1) =1. Seetõttu a ij (k) a jj (1) =1 ja a ij (k+1) =1. Kui lühima tee pikkus punktist v i punkti v j on võrdne k+1, siis olgu v r selle eelviimane tipp. Siis v i-st v r-ni on tee pikkusega k ja induktsioonihüpoteesi kohaselt a ir (k) =1. Kuna (v r ,v j) E, siis a_(rj)^((1))=1. Seetõttu a ir (k) a rj (1) =1 ja a ij (k+1) =1.
Ja vastupidi, kui a ij (k+1) =1, siis vähemalt ühe r korral on liite a ir (k) a rj (1) võrdne 1-ga. Kui see on r=j, siis a ij (k) = 1 ja induktiivse hüpoteesi kohaselt on G-l tee v i-st v j-ni pikkusega k. Kui r j, siis a ir (k) =1 ja a rj (1) =1. See tähendab, et G-l on tee v i-st v r pikkusega k ja serv (v r ,v j) E. Neid kombineerides saame tee punktist v i punkti v j pikkusega k+1.
Lemmadest 9.1 ja 9.2 saame otse
Tagajärg 1. Olgu G=(V,E) n tipuga suunatud graaf ja G * selle ligipääsetavuse graaf. Siis A_(G*) = . Tõestus. Lemma 5.1 eeldab, et kui G-l on tee u-st v u-ni, siis on tal ka lihtne tee u-st v-ni pikkusega n-1. Ja Lemma 5.2 järgi on kõik sellised teed maatriksis esindatud.
Seega taandatakse G-le ligipääsetavuse graafiku naabrusmaatriksi A G* koostamise protseduur maatriksi tõstmiseks astmeni n-1. Teeme selle protseduuri lihtsustamiseks mõned märkused.
kus k on väikseim arv, mille puhul 2 k n.
selline r leitakse, et a ir = 1 ja a rj =1, siis kogu summa a ij (2) =1. Seetõttu võib ülejäänud tingimusi ignoreerida.
Näide 9.3. Vaatleme näitena ligipääsetavuse graafiku maatriksi A G* arvutamist graafikule G esitatud graafikule. joon.9.2. Sel juhul

Kuna G-l on 6 tippu, siis . Arvutame selle maatriksi:

ja (viimast võrdsust on lihtne kontrollida). Sellel viisil,

Nagu näete, määratleb see maatriks tõesti näidatud graafiku joon.9.3.
Vastastikune juurdepääsetavus, tugevalt seotud komponendid ja graafiku alused
Analoogiliselt ligipääsetavuse graafikuga määratleme tugeva ligipääsetavuse graafiku.
Definitsioon 9.10. Olgu G=(V,E) suunatud graaf. Tugevalt kättesaadaval graafil G * * =(V,E * *) G jaoks on sama tippude komplekt V ja järgmine servade komplekt E * * =( (u, v) | G-s on tipud v ja u vastastikku kättesaadav).
Kättesaadavuse graafiku maatriksist on lihtne koostada tugeva ligipääsetavuse graafiku maatriks. Tõepoolest, jõutavuse ja tugeva ligipääsetavuse definitsioonidest tuleneb otseselt, et kõigi paaride (i,j), 1 i,j n korral on elemendi väärtus võrdne 1-ga siis ja ainult siis, kui mõlemad elemendid A G* (i, j) ja A G* (j, i) on võrdsed 1-ga, st.
Maatriksi põhjal saab graafi G tugevalt seotud komponendid välja tuua järgmiselt.
Asetame komponendis K 1 tipp v 1 ja kõik tipud v j nii, et A_(G_*^*)(1,j) = 1.
Olgu komponendid K 1 , …, K i ja v k juba ehitatud - see on minimaalse arvuga tipp, mida pole veel komponentides sisaldunud. Seejärel asetame komponendisse K_(i+1) tipu v k ja kõik sellised tipud v j ,
et A_(G_*^*)(k,j) = 1.
Korrake sammu (2), kuni kõik tipud on komponentide vahel jaotatud.
Meie näites graafiku G jaoks joon.2 maatriksi abil saame tugeva ligipääsetavuse graafiku järgmise maatriksi

Kasutades ülalkirjeldatud protseduuri, leiame, et graafi G tipud on jagatud 4 tugevalt seotud komponendiks: K 1 = (v 1 , v 2 , v 3 ), \ K 2 =( v 4 ), \ K 3 = ( v 5 ), \ K 4 = ( v 6 ). Tugevalt seotud komponentide komplekti puhul määratleme ka ligipääsetavuse seose.
Definitsioon 9.11. Olgu K ja K" graafi G tugevalt seotud komponendid. Komponent K on ligipääsetav komponendid K^\prime, kui K= K" või on kaks tippu u K ja v K" nii, et u on v-st kättesaadav. K aastast rangelt saavutatav K^\prime, kui K K" ja K on K". K-komponenti nimetatakse miinimum kui see pole ühestki komponendist rangelt kättesaadav.
Kuna ühes komponendis on kõik tipud vastastikku kättesaadavad, siis on hästi näha, et saavutatavuse ja range jõudluse seosed komponentidel ei sõltu tippude u K ja v K valikust.
Definitsioonist on lihtne tuletada järgmine rangele ligipääsetavuse tunnus.
Lemma 9.3. Range kättesaadavuse seos on osalise järjekorra seos, s.o. see on refleksivastane, antisümmeetriline ja transitiivne.
Seda seost saab esitada suunatud graafina, mille tipud on komponendid ja serv (K, K) tähendab, et K on K-st rangelt kättesaadav. peal riis. 9.4 see komponentide graafik on näidatud ülaltoodud graafiku G jaoks.

Riis. 9.4.
Sel juhul on üks minimaalne komponent K 2 .
Paljudes rakendustes on suunatud graafik mõne ressursi jaotusvõrk: toode, toode, teave jne. Sellistel juhtudel tekib loomulikult probleem selliste punktide (tippude) minimaalse arvu leidmisega, kust seda ressurssi saab võrgu mis tahes punkti toimetada.
Definitsioon 9.12. Olgu G=(V,E) suunatud graaf. Nimetatakse tippude alamhulka W V generatiivne, kui W tippudest on võimalik jõuda mis tahes graafi tippu. Tippude alamhulka W V nimetatakse graafi baasiks, kui see genereerib, kuid ükski tema enda alamhulk ei genereeri.
Järgmine teoreem võimaldab tõhusalt leida kõik graafi alused.
Teoreem 9.1. Olgu G=(V,E) suunatud graaf. Tippude alamhulk W V on G alus siis ja ainult siis, kui see sisaldab ühte tippu igast G minimaalsest tugevalt seotud komponendist ja ei sisalda muid tippe.
Tõestus Pane kõigepealt tähele, et iga graafi tipp on saavutatav tipust, mis kuulub mingisse minimaalsesse komponenti. Seetõttu genereeritakse tippude hulk W, mis sisaldab igast minimaalsest komponendist ühte tippu, ja kui mõni tipp sealt eemaldada, lakkab see olemast, kuna vastava minimaalse komponendi tipud muutuvad kättesaamatuks. Seetõttu on W alus.
Ja vastupidi, kui W on alus, siis peab see sisaldama vähemalt ühte tippu igast minimaalsest komponendist, vastasel juhul on sellise minimaalse komponendi tipud kättesaamatud. W ei saa sisaldada muid tippe, kuna igaüks neist on kättesaadav juba kaasatud tippudest.
See teoreem hõlmab järgmist protseduuri graafiku G ühe konstrueerimiseks või kõigi aluste loetlemiseks.
Leidke kõik G tugevalt seotud komponendid.
Määrake nende järjekord ja valige komponendid, mis on selle järjestuse suhtes minimaalsed.
Genereerige üks või kõik graafiku alused, valides igast minimaalsest komponendist ühe tipu.
Näide 9.5. Defineerime kõik joonisel näidatud suunatud graafiku G alused joon.9.5.

Riis. 9.5. krahv G
Esimeses etapis leiame G tugevalt seotud komponendid:
Teises etapis koostame nende komponentide kohta range juurdepääsetavuse graafiku.

Riis. 9.6. Kättesaadavuse seoste graafik G komponentidel
Määrame minimaalsed komponendid: K 2 = ( b ), K 4 =( d, e, f, g) ja K 7 = ( r).
Lõpuks loetleme kõik neli G alust: B 1 = ( b, d, r), B 2 = ( b, e, r), B 3 = ( b, f, r) ja B 1 = ( b, g , r) .
Ülesanded
Probleem 9.1. Tõesta, et suvalise suunatud graafi kõigi tippude astmete summa on paaris.
Sellel probleemil on populaarne tõlgendus: tõestada, et peole tulnud inimeste käepigistuste koguarv on alati ühtlane.
Ülesanne 9.2. Loetlege kõik mitteisomorfsed suunamata graafid, millel on maksimaalselt neli tippu.
Ülesanne 9.3. Tõesta, et suunamata ühendatud graaf jääb pärast mõne serva eemaldamist seotuks ↔ see serv kuulub mõnda tsüklisse.
Ülesanne 9.4. Tõesta, et n tipuga suunamata ühendatud graaf
sisaldab vähemalt n-1 serva,
kui see sisaldab rohkem kui n-1 serva, siis on sellel vähemalt üks tsükkel.
Ülesanne 9.5. Tõesta, et igas 6-liikmelises grupis on kolm paarikaupa tuttavat või kolm paarikaupa võõrast.
Ülesanne 9.6. Tõesta, et suunamata graaf G=(V,E) on ühendatud ↔ iga jaotuse V= V 1 V 2 jaoks mittetühjade V 1 ja V 2 korral on serv, mis ühendab V 1 ja V 2 .
Ülesanne 9.7. Tõesta, et kui suunamata graafis on täpselt kaks paaritu astme tippu, siis on need ühendatud teega.
Ülesanne 9.8. Olgu G=(V,E) suunamata graaf |E|< |V|-1. Докажите, что тогда G несвязный граф.
Ülesanne 9.9. Tõesta, et mis tahes kahel maksimaalse pikkusega lihtsal rajal ühendatud suunamata graafis on ühine tipp.
Ülesanne 9.10. Olgu suunamata graafil ilma silmusteta G=(V,E) k ühendatud komponenti. Tõesta seda siis
Ülesanne 9.11. Määrake, mille jaoks on kättesaadavuse graafik
n tipu ja tühja servade hulgaga graaf;
n tipuga graaf: V= (v 1 ,… , v n ), mille servad moodustavad tsükli:
Ülesanne 9.12. Arvutage graafiku jaoks kättesaadavuse graafiku maatriks
ja koostada vastav ligipääsetavuse graafik. Leia kõik graafiku G alused.
Ülesanne 9.13. Ehita edasi antud riis. 9.7 suunatud graafik G 1 =(V,E) selle naabrusmaatriks A G1 , esinemismaatriks B G1 ja naabrusnimekirjad. Arvutage ligipääsetavuse maatriks A G1* ja koostage vastav kättesaadavuse graafik G 1 * .

Riis. 9.7.
Suunamata ja orienteeritud puud
Puud on üks huvitavamaid graafikuklasse, mida kasutatakse mitmesuguste hierarhiliste struktuuride esindamiseks.
Definitsioon 10.1. Suunamata graafi nimetatakse puuks, kui see on ühendatud ja sellel pole tsükleid.
Definitsioon 10.2. Suunatud graafi G=(V,E) nimetatakse (suunatud) puuks, kui
peal riis. 10.1 on näidatud suunamata puu G 1 ja suunatud puu G 2 näited. Pange tähele, et puu G 2 saadakse G 1-st, valides tipu c juureks ja orienteerides kõik servad "juurest eemale" suunas.

Riis. 10.1. Suunamata ja suunatud puud
See pole juhus. Tõesta endale järgmine väide suunamata ja suunatud puude seose kohta.
Lemma 10.1. Kui suvalises suunamata puus G=(V,E) valime juureks suvalise tipu v V ja orienteerime kõik servad "juurest" suunas, s.t. tee v kõigi temaga langevate servade alguseks, v-ga külgnevad tipud - kõigi v-le langevate veel suunamata servade algused jne, siis on saadud suunatud graaf G" suunatud puu.
Suunamata ja suunatud puudel on palju samaväärseid omadusi.
Teoreem 10.1. Olgu G=(V,E) suunamata graaf. Siis on järgmised tingimused samaväärsed.
G on puu.
Iga kahe G tipu jaoks on ainulaadne tee, mis neid ühendab.
G on ühendatud, kuid kui mõni serv E-st eemaldatakse, lakkab see olema ühendatud.
G on ühendatud ja |E| = |V| - üks.
G on atsükliline ja |E| = |V| - üks.
G on atsükliline, kuid mis tahes serva lisamine E-le genereerib tsükli.
Tõestus(1) (2): Kui G-s oleks kaks tippu ühendatud kahe teega, siis ilmselgelt oleks G-s tsükkel. Kuid see on vastuolus puu määratlusega punktis (1).
(2) (3): Kui G on ühendatud, kuid E jääb mõne serva (u,v) eemaldamisel seotuks, siis on u ja v vahel tee, mis seda serva ei sisalda. Kuid siis on G-l vähemalt kaks teed, mis ühendavad u ja v, mis on vastuolus tingimusega (2).
(3) (4): antakse lugejale (vt ülesanne 9.4).
(4) (5): Kui G sisaldab tsüklit ja on ühendatud, siis tsüklist suvalise serva eemaldamisel ei tohiks ühendus katkeda, vaid servad jäävad |E|= V -2 ja ülesande 9.4(a) järgi ), peab ühendatud graafikul olema vähemalt V -1 ribid. Saadud vastuolu näitab, et G-s pole tsükleid ja tingimus (5) on täidetud.
(5) (6): Oletame, et serva (u,v) lisamine E-le ei andnud tulemuseks tsüklit. Siis on G-s olevad tipud u ja v erinevates ühendatud komponentides. Kuna |E|= V -1, siis ühes neist komponentidest olgu (V 1 ,E 1), servade arv ja tippude arv on sama: |E 1 |=|V 1 |. Kuid siis sisaldab see tsüklit (vt ülesanne 9.4(b)), mis on vastuolus sellega, et G on atsükliline.
(6) (1): Kui G ei oleks ühendatud, siis oleks erinevatest ühendatud komponentidest kaks tippu u ja v. Siis ei tooks serva (u,v) lisamine E-le kaasa tsükli ilmnemist, mis on vastuolus (6). Seega on G ühendatud ja on puu.
Suunatud puude puhul on sageli mugav kasutada järgmist induktiivset definitsiooni.
Definitsioon 10.3. Me määratleme induktsiooni abil suunatud graafikute klassi, mida nimetatakse puudeks. Samal ajal määratleme igaühe jaoks valitud tipu - juure.
Riis. 10.2 illustreerib seda määratlust.

Riis. 10.2. Suunatud puude induktiivne määratlus
Teoreem 10.2. Suunatud puude 10.2 ja 10.3 määratlused on samaväärsed.
Tõestus Graaf G=(V,E) täidab definitsiooni 10.2 tingimused. Näitame tippude arvu |V| induktsiooni abil, et .
Kui |V|=1, siis ainsaks tipuks v V on puu juur omaduse (1) järgi, st. sellel graafikul pole servi: E = . Siis .
Oletame, et mis tahes n tipuga graaf, mis vastab definitsioonile 10.2, sisaldub . Graaf G=(V,E) (n+1)-nda tipuga täidab definitsiooni 10.2 tingimusi. Tingimuse (1) järgi on selle juurtipp r 0 . Olgu r 0-st tekkinud k serva ja need viivad tippudesse r 1 , … , r k (k 1). Tähista G i ,(i=1, …, k) graafik, mis sisaldab tippe V i =( v V|v \textit( )r i ) ja neid ühendavaid servi E i E. Seda on lihtne näha et G i vastab definitsiooni 10.2 tingimustele. Tõepoolest, r i ei sisalda servi, st see tipp on G i juur. Igal teisel V i tipul on üks serv, nagu ka G . Kui v V i , siis on see juurejuurest r i graafi G i definitsiooni järgi kättesaadav. Alates |V i | n, siis induktiivse hüpoteesi järgi . Siis saadakse graaf G definitsiooni 10.3 induktiivreegli (2) abil puudest G 1 , …, G k ja kuulub seetõttu klassi .
⇐ Kui mõni graaf G=(V,E) kuulub klassi , siis on definitsiooni 10.2 tingimuste (1)-(3) täitmine selle jaoks kergesti tuvastatav definitsiooni 10.2 induktsiooniga. Jätame selle harjutuseks lugejale.
Orienteeritud puudega on seotud rikkalik terminoloogia, mis pärineb kahest allikast: botaanikast ja perekondlike suhete valdkonnast.
Juur on ainus tipp, millel ei ole servi, lehed on tipud, millel pole servi. Teed juurest leheni nimetatakse puu oksaks. Puu kõrgus on selle okste maksimaalne pikkus. Tipu sügavus on tee pikkus juurest selle tipuni. Tipu v V korral moodustab puu T=(V,E) alamgraaf, mis sisaldab kõiki v-st ulatuvaid tippe ja neid ühendavaid servi E-st, puu T alampuu T v juurega v (vt Ülesanne 10.3 ). V kõrgus on puu kõrgus T v. Graafi, mis on mitme mitteristuva puu liit, nimetatakse metsaks.
Kui serv viib tipust v tippu w, siis kutsutakse v isa w ja w - poeg v (hiljuti on ingliskeelses kirjanduses kasutusel aseksuaalne terminipaar: vanem - laps). Puu definitsioonist tuleneb otseselt, et igal tipul on peale juure ka ainulaadne isa. Kui tee viib tipust v tippu w, siis v nimetatakse w eellaseks ja w v järglaseks. Nimetatakse tippe, millel on ühine isa vennad või õed.
Toome välja veel ühe graafikute klassi, mis üldistab suunatud puid – suunatud atsüklilisi. Kaht tüüpi selliseid märgistatud graafikuid kasutatakse allpool Boole'i funktsioonide esitamiseks. Nendel graafikutel võib olla mitu juurt - tipud, mis ei sisalda servi, ja igal tipul võib olla mitu serva, mitte üks, nagu puudel.
arvuti tehnoloogia, eriti programm ... 2009 aasta Algkool on katsekoht peal föderaalliidu tutvustamine olek ...
S EIREMEEDIA Kutsehariduse kaasajastamine Märts - august 2011. a
KokkuvõteUnited olek eksamid" peal valik": informatiivne arvutitehnoloogia, bioloogia ja kirjandus. Muide, selles aastal KASUTAGE... küsimus„Ravindamise tulemuste kohta programmid aastal riiklike teadusülikoolide areng 2009 -2010 aastat". ...
STRATEEGILINE ARENGUPROGRAMM Tver 2011. a
ProgrammAT 2009 aastal. 2010. aastal nähtud struktuurinihked aastalpeal poole 2009 , ... Professionaalselt – orienteeritud võõrkeel“, „Kaasaegne haridus tehnoloogia". Igas programm täiendõppe moodul" osariik ...
Analoogiliselt ligipääsetavuse graafikuga määratleme tugeva ligipääsetavuse graafiku.
Definitsioon:
Olgu suunatud graafik. Tugev ligipääsetavuse graafik jaoks
jaoks  on ka palju tippe
on ka palju tippe  ja järgmine servade komplekt
ja järgmine servade komplekt  veerus
veerus  tipud
tipud  ja
ja  vastastikku kättesaadavad.
vastastikku kättesaadavad.
Kättesaadavuse graafiku maatriksi järgi  maatriksi koostamine on lihtne
maatriksi koostamine on lihtne  tugeva ligipääsetavuse graafik. Tõepoolest, see tuleneb otseselt kättesaadavuse ja tugeva ligipääsetavuse definitsioonidest kõigi paaride puhul
tugeva ligipääsetavuse graafik. Tõepoolest, see tuleneb otseselt kättesaadavuse ja tugeva ligipääsetavuse definitsioonidest kõigi paaride puhul  ,
, , elemendi väärtus
, elemendi väärtus  võrdub 1-ga siis ja ainult siis, kui mõlemad elemendid
võrdub 1-ga siis ja ainult siis, kui mõlemad elemendid  ja
ja  on võrdsed 1-ga, st.
on võrdsed 1-ga, st.
Maatriksi järgi  välja võib tuua graafi tugevalt seotud komponendid
välja võib tuua graafi tugevalt seotud komponendid  järgmisel viisil:
järgmisel viisil:

Korrake teist sammu, kuni kõik tipud on komponentide vahel jaotatud.
Meie näites graafiku jaoks  näide 14.1. maatriksi järgi
näide 14.1. maatriksi järgi  saame tugeva ligipääsetavuse graafiku järgmise maatriksi
saame tugeva ligipääsetavuse graafiku järgmise maatriksi

Kasutades ülalkirjeldatud protseduuri, leiame, et graafiku tipud  on jagatud 4 tugevalt seotud komponendiks:
on jagatud 4 tugevalt seotud komponendiks:  ,
, ,
, ,
, . Tugevalt seotud komponentide komplekti puhul määratleme ka ligipääsetavuse seose.
. Tugevalt seotud komponentide komplekti puhul määratleme ka ligipääsetavuse seose.
Definitsioon:
Lase  ja
ja  on graafiku tugevalt seotud komponendid
on graafiku tugevalt seotud komponendid  . Komponent
. Komponent  saavutatav komponendist
saavutatav komponendist  , kui
, kui  või on selliseid tippe kaks
või on selliseid tippe kaks  ja
ja  , mida
, mida  on ligipääsetav
on ligipääsetav  .
. aastast rangelt saavutatav
aastast rangelt saavutatav  , kui
, kui  ja
ja  on ligipääsetav
on ligipääsetav  . Komponent
. Komponent  nimetatakse minimaalseks, kui see pole ühestki komponendist rangelt kättesaadav.
nimetatakse minimaalseks, kui see pole ühestki komponendist rangelt kättesaadav.
Kuna ühes komponendis on kõik tipud vastastikku kättesaadavad, siis on lihtne aru saada, et saavutatavuse ja range jõudluse seosed komponentidel ei sõltu tippude valikust  ja
ja  .
.
Definitsioonist on lihtne tuletada järgmine rangele ligipääsetavuse tunnus.
Lemma: Range kättesaadavuse seos on osalise järjekorra seos, s.o. see on refleksivastane, antisümmeetriline ja transitiivne.
Seda seost saab esitada suunatud graafina, mille tipud on komponendid ja serv  tähendab seda
tähendab seda  aastast rangelt saavutatav
aastast rangelt saavutatav  . Näite 14.1 komponentide graafik on näidatud allpool.
. Näite 14.1 komponentide graafik on näidatud allpool.

Sel juhul on üks miinimumkomponent  .
.
Paljudes rakendustes on suunatud graafik mõne ressursi jaotusvõrk: toode, toode, teave jne. Sellistel juhtudel tekib loomulikult probleem selliste punktide (tippude) minimaalse arvu leidmisega, kust seda ressurssi saab võrgu mis tahes punkti toimetada.
Definitsioon:
Lase  on suunatud graafik. Tippude alamhulk
on suunatud graafik. Tippude alamhulk  helistas generatiivne kui tippudest
helistas generatiivne kui tippudest  graafiku mis tahes tipuni on võimalik jõuda. Tippude alamhulk
graafiku mis tahes tipuni on võimalik jõuda. Tippude alamhulk  nimetatakse graafiku aluseks, kui see genereerib, kuid ükski selle õige alamhulk ei genereeri.
nimetatakse graafiku aluseks, kui see genereerib, kuid ükski selle õige alamhulk ei genereeri.
Järgmine teoreem võimaldab tõhusalt leida kõik graafi alused.
Teoreem:
Lase
 on suunatud graafik. Tippude alamhulk
on suunatud graafik. Tippude alamhulk
 on alus
on alus
 siis ja ainult siis, kui sisaldab ühte tippu igast minimaalselt tugevalt seotud komponendist
siis ja ainult siis, kui sisaldab ühte tippu igast minimaalselt tugevalt seotud komponendist
 ja ei sisalda muid tippe.
ja ei sisalda muid tippe.
Tõestus:
pane esmalt tähele, et iga graafi tipp on saavutatav tipust, mis kuulub mingisse minimaalsesse komponenti. Seega tippude hulk  , mis sisaldab igast minimaalsest komponendist ühte tippu, genereerib ja kui mõni tipp sellest eemaldatakse, lakkab see olemast, kuna vastava minimaalse komponendi tipud muutuvad kättesaamatuks. Sellepärast
, mis sisaldab igast minimaalsest komponendist ühte tippu, genereerib ja kui mõni tipp sellest eemaldatakse, lakkab see olemast, kuna vastava minimaalse komponendi tipud muutuvad kättesaamatuks. Sellepärast  on alus.
on alus.
Ja vastupidi, kui  on alus, siis peab see sisaldama igast minimaalsest komponendist vähemalt ühte tippu, vastasel juhul on sellise minimaalse komponendi tipud kättesaamatud. Muid tippe pole
on alus, siis peab see sisaldama igast minimaalsest komponendist vähemalt ühte tippu, vastasel juhul on sellise minimaalse komponendi tipud kättesaamatud. Muid tippe pole  ei saa sisaldada, kuna igaüks neist on kättesaadav juba kaasatud tippudest.
ei saa sisaldada, kuna igaüks neist on kättesaadav juba kaasatud tippudest.
See teoreem hõlmab järgmist protseduuri ühe graafiku koostamiseks või kõigi graafi aluste loetlemiseks  :
:

Näide 14.3:
Määratlege kõik suunatud graafi alused  .
.

Esimeses etapis leiame tugevalt seotud komponendid  :
:
Teises etapis koostame nende komponentide kohta range juurdepääsetavuse graafiku.

Määratleme minimaalsed komponendid:  ,
, ja
ja  .
.
Lõpuks loetledes kõik neli alust  :
: ,
, ,
, ja
ja  .
.

