Kąt między wektorami
Aby wprowadzić pojęcie iloczynu wektorowego dwóch wektorów, musimy najpierw zrozumieć takie pojęcie, jak kąt między tymi wektorami.
Otrzymamy dwa wektory $\overline(α)$ i $\overline(β)$. Weźmy jakiś punkt $O$ w przestrzeni i wykreślmy z niego wektory $\overline(α)=\overline(OA)$ i $\overline(β)=\overline(OB)$, a następnie kąt $AOB$ będziemy nazywać kątem pomiędzy tymi wektorami (ryc. 1).
Notacja: $∠(\overline(α),\overline(β))$
Pojęcie iloczynu wektorów wektorów i wzór na znalezienie
Definicja 1
Iloczyn wektorowy dwóch wektorów jest wektorem prostopadłym do obu danych wektorów, a jego długość będzie równa iloczynowi długości tych wektorów z sinusem kąta między tymi wektorami, a także ten wektor z dwoma początkowymi ma taką samą orientację jak kartezjański układ współrzędnych.
Notacja: $\overline(α)х\overline(β)$.
Matematycznie wygląda to tak:
- $|\overline(α)х\overline(β)|=|\overline(α)||\overline(β)|sin∠(\overline(α),\overline(β))$
- $\overline(α)х\overline(β)⊥\overline(α)$, $\overline(α)х\overline(β)⊥\overline(β)$
- $(\overline(α)х\overline(β),\overline(α),\overline(β))$ i $(\overline(i),\overline(j),\overline(k))$ to tak samo zorientowany (ryc. 2)
Oczywiście iloczyn zewnętrzny wektorów będzie równy wektorowi zerowemu w dwóch przypadkach:
- Jeśli długość jednego lub obu wektorów wynosi zero.
- Jeśli kąt pomiędzy tymi wektorami jest równy $180^\circ$ lub $0^\circ$ (ponieważ w tym przypadku sinus wynosi zero).
Aby wyraźnie zobaczyć, jak znajduje się iloczyn wektorowy wektorów, rozważ następujące przykłady rozwiązań.
Przykład 1
Znajdź długość wektora $\overline(δ)$, która będzie wynikiem iloczynu wektorów wektorów o współrzędnych $\overline(α)=(0,4,0)$ i $\overline(β) =(3,0,0)$.
Rozwiązanie.
Przedstawmy te wektory w kartezjańskiej przestrzeni współrzędnych (ryc. 3):
Rysunek 3. Wektory w kartezjańskiej przestrzeni współrzędnych. Author24 - internetowa wymiana prac studenckich
Widzimy, że wektory te leżą odpowiednio na osiach $Ox$ i $Oy$. Zatem kąt między nimi będzie wynosił 90^\circ$. Znajdźmy długości tych wektorów:
$|\overline(α)|=\sqrt(0+16+0)=4$
$|\overline(β)|=\sqrt(9+0+0)=3$
Następnie, zgodnie z definicją 1, otrzymujemy moduł $|\overline(δ)|$
$|\overline(δ)|=|\overline(α)||\overline(β)|sin90^\circ=4\cdot 3\cdot 1=12$
Odpowiedź: 12 dolarów.
Obliczanie iloczynu krzyżowego ze współrzędnych wektorowych
Definicja 1 od razu implikuje metodę znajdowania iloczynu wektorowego dla dwóch wektorów. Ponieważ wektor oprócz wartości ma także kierunek, nie da się go znaleźć jedynie przy pomocy wielkości skalarnej. Ale poza tym istnieje również sposób na znalezienie podanych nam wektorów za pomocą współrzędnych.
Dano nam wektory $\overline(α)$ i $\overline(β)$, które będą miały współrzędne odpowiednio $(α_1,α_2,α_3)$ i $(β_1,β_2,β_3)$. Następnie wektor iloczynu poprzecznego (czyli jego współrzędne) można znaleźć, korzystając z następującego wzoru:
$\overline(α)х\overline(β)=\begin(vmatrix)\overline(i)&\overline(j)&\overline(k)\\α_1&α_2&α_3\\β_1&β_2&β_3\end(vmatrix)$
W przeciwnym wypadku rozwijając wyznacznik otrzymamy następujące współrzędne
$\overline(α)х\overline(β)=(α_2 β_3-α_3 β_2,α_3 β_1-α_1 β_3,α_1 β_2-α_2 β_1)$
Przykład 2
Znajdź wektor iloczynu wektorów współliniowych $\overline(α)$ i $\overline(β)$ o współrzędnych $(0,3,3)$ i $(-1,2,6)$.
Rozwiązanie.
Skorzystajmy ze wzoru podanego powyżej. Dostajemy
$\overline(α)х\overline(β)=\begin(vmatrix)\overline(i)&\overline(j)&\overline(k)\\0&3&3\\-1&2&6\end(vmatrix)=(18 -6)\overline(i)-(0+3)\overline(j)+(0+3)\overline(k)=12\overline(i)-3\overline(j)+3\overline(k )=(12,-3,3)$
Odpowiedź: $(12,-3,3)$.
Własności iloczynu wektorowego wektorów
Dla dowolnych trzech wektorów mieszanych $\overline(α)$, $\overline(β)$ i $\overline(γ)$ oraz $r∈R$ zachodzą następujące własności:
Przykład 3
Znajdź obszar równoległoboku, którego wierzchołki mają współrzędne $(3,0,0)$, $(0,0,0)$, $(0,8,0)$ i $(3,8,0) $.
Rozwiązanie.
Najpierw zobrazujmy ten równoległobok w przestrzeni współrzędnych (ryc. 5):
Rysunek 5. Równoległobok w przestrzeni współrzędnych. Author24 - internetowa wymiana prac studenckich
Widzimy, że dwie strony tego równoległoboku są zbudowane przy użyciu współliniowych wektorów o współrzędnych $\overline(α)=(3,0,0)$ i $\overline(β)=(0,8,0)$. Korzystając z czwartej własności otrzymujemy:
$S=|\overline(α)х\overline(β)|$
Znajdźmy wektor $\overline(α)х\overline(β)$:
$\overline(α)х\overline(β)=\begin(vmatrix)\overline(i)&\overline(j)&\overline(k)\\3&0&0\\0&8&0\end(vmatrix)=0\overline (i)-0\nadkreślenie(j)+24\nadkreślenie(k)=(0,0,24)$
Stąd
$S=|\overline(α)х\overline(β)|=\sqrt(0+0+24^2)=24$
W tej lekcji przyjrzymy się dwóm kolejnym operacjom na wektorach: iloczyn wektorowy wektorów I mieszany produkt wektorów (link natychmiastowy dla potrzebujących). W porządku, czasami zdarza się, że dla pełnego szczęścia, w dodatku Iloczyn skalarny wektorów potrzeba coraz więcej. To jest uzależnienie od wektorów. Może się wydawać, że wkraczamy w dżunglę geometrii analitycznej. To jest źle. W tej części wyższej matematyki jest ogólnie mało drewna, może z wyjątkiem Pinokia. W rzeczywistości materiał jest bardzo powszechny i prosty - niewiele bardziej skomplikowany niż ten sam produkt skalarny, będzie jeszcze mniej typowych zadań. Najważniejsze w geometrii analitycznej, o czym wielu się przekona lub już przekonało, to NIE POPEŁNIAĆ BŁĘDÓW W OBLICZENIACH. Powtarzaj jak zaklęcie, a będziesz szczęśliwy =)
Jeśli wektory błyszczą gdzieś daleko, jak błyskawica na horyzoncie, nie ma to znaczenia, zacznij od lekcji Wektory dla manekinów przywrócenie lub ponowne zdobycie podstawowej wiedzy o wektorach. Bardziej przygotowani czytelnicy mogą zapoznać się z informacjami wybiórczo; starałem się zebrać jak najpełniejszy zbiór przykładów, które często spotyka się w pracy praktycznej
Co sprawi, że od razu będziesz szczęśliwy? Kiedy byłem mały, umiałem żonglować dwiema, a nawet trzema piłkami. To zadziałało dobrze. Teraz nie będziesz musiał w ogóle żonglować, ponieważ rozważymy tylko wektory przestrzenne, a wektory płaskie z dwiema współrzędnymi zostaną pominięte. Dlaczego? Tak narodziły się te działania - wektor i iloczyn mieszany wektorów są definiowane i działają w przestrzeni trójwymiarowej. To już jest łatwiejsze!
Operacja ta, podobnie jak iloczyn skalarny, obejmuje dwa wektory. Niech to będą listy niezniszczalne.
Sama akcja oznaczony przez w następujący sposób: . Istnieją inne opcje, ale jestem przyzwyczajony do oznaczania iloczynu wektorów w ten sposób, w nawiasach kwadratowych z krzyżykiem.
I od razu pytanie: jeśli w Iloczyn skalarny wektorów w grę wchodzą dwa wektory i tutaj także dwa wektory są mnożone jaka jest różnica? Oczywistą różnicą jest przede wszystkim WYNIK:
Wynikiem iloczynu skalarnego wektorów jest LICZBA:
Wynikiem iloczynu wektorów jest WEKTOR: , czyli mnożymy wektory i ponownie otrzymujemy wektor. Zamknięty klub. Właściwie stąd wzięła się nazwa operacji. W różnej literaturze edukacyjnej oznaczenia mogą się również różnić, użyję litery.
Definicja produktu krzyżowego
Najpierw będzie definicja ze zdjęciem, potem komentarze.
Definicja: Produkt wektorowy niewspółliniowy wektory, podjęte w tej kolejności, zwany WEKTOREM, długość czyli liczbowo równy obszarowi równoległoboku, zbudowane na tych wektorach; wektor ortogonalne do wektorów, i jest skierowany tak, aby podstawa miała właściwą orientację: 
Rozłóżmy definicję kawałek po kawałku, jest tu wiele interesujących rzeczy!
Można zatem wyróżnić następujące istotne punkty:
1) Oryginalne wektory, z definicji oznaczone czerwonymi strzałkami nie współliniowy. Przypadek wektorów współliniowych będzie odpowiedni do rozważenia nieco później.
2) Pobierane są wektory w ściśle określonej kolejności: – „a” jest mnożone przez „być”, a nie „być” z „a”. Wynik mnożenia wektorów to WEKTOR, zaznaczony na niebiesko. Jeśli wektory pomnożymy w odwrotnej kolejności, otrzymamy wektor o równej długości i przeciwnym kierunku (kolor malinowy). Oznacza to, że równość jest prawdziwa ![]() .
.
3) Teraz zapoznajmy się z geometrycznym znaczeniem iloczynu wektorowego. To bardzo ważny punkt! DŁUGOŚĆ niebieskiego wektora (a zatem wektora szkarłatnego) jest liczbowo równa POWIERZCHNI równoległoboku zbudowanego na wektorach. Na rysunku ten równoległobok jest zacieniowany na czarno.
Notatka : rysunek jest schematyczny i oczywiście nominalna długość produktu wektorowego nie jest równa powierzchni równoległoboku.
Przypomnijmy jeden ze wzorów geometrycznych: Pole równoległoboku jest równe iloczynowi sąsiednich boków i sinusowi kąta między nimi. Dlatego na podstawie powyższego obowiązuje wzór na obliczenie DŁUGOŚCI iloczynu wektorowego:
Podkreślam, że wzór dotyczy DŁUGOŚCI wektora, a nie samego wektora. Jakie jest praktyczne znaczenie? Znaczenie jest takie, że w problemach geometrii analitycznej obszar równoległoboku często znajduje się poprzez koncepcję iloczynu wektorowego:
Uzyskajmy drugi ważny wzór. Przekątna równoległoboku (czerwona przerywana linia) dzieli go na dwa równe trójkąty. Dlatego pole trójkąta zbudowanego na wektorach (czerwone cieniowanie) można znaleźć za pomocą wzoru:
4) Równie ważnym faktem jest to, że wektor jest ortogonalny do wektorów, tzn ![]() . Oczywiście wektor skierowany przeciwnie (malinowa strzałka) jest również ortogonalny do wektorów oryginalnych.
. Oczywiście wektor skierowany przeciwnie (malinowa strzałka) jest również ortogonalny do wektorów oryginalnych.
5) Wektor jest skierowany tak, że podstawa To ma Prawidłowy orientacja. Na lekcji o przejście na nową podstawę Mówiłem wystarczająco szczegółowo o orientacja płaska, a teraz dowiemy się, jaka jest orientacja przestrzenna. Wyjaśnię ci to na palcach prawa ręka. Mentalnie połącz palec wskazujący z wektorem i środkowy palec z wektorem. Palec serdeczny i mały palec wciśnij go w dłoń. W rezultacie kciuk– produkt wektorowy wyświetli się. Jest to podstawa zorientowana na prawo (jest to ta na rysunku). Teraz zmień wektory ( palce wskazujące i środkowe) w niektórych miejscach, w wyniku czego kciuk się obróci, a produkt wektorowy będzie już patrzył w dół. Jest to również podstawa zorientowana na prawo. Możesz mieć pytanie: która podstawa opuściła orientację? „Przypisz” do tych samych palców lewa ręka wektory i uzyskaj lewą podstawę i lewą orientację przestrzeni (w tym przypadku kciuk będzie zlokalizowany w kierunku dolnego wektora). Mówiąc obrazowo, podstawy te „przekręcają” lub orientują przestrzeń w różnych kierunkach. I tej koncepcji nie należy uważać za coś naciąganego lub abstrakcyjnego - na przykład najzwyklejsze lustro zmienia orientację przestrzeni, a jeśli „wyciągniesz odbity obiekt z lustra”, to w ogólnym przypadku będzie to nie będzie możliwości połączenia go z „oryginałem”. Przy okazji podnieś trzy palce do lustra i przeanalizuj odbicie ;-)
...jak dobrze, że teraz o tym wiesz zorientowane na prawo i lewo baz, bo wypowiedzi niektórych wykładowców o zmianie orientacji są przerażające =)
Iloczyn krzyżowy wektorów współliniowych
Definicja została omówiona szczegółowo, pozostaje dowiedzieć się, co się dzieje, gdy wektory są współliniowe. Jeśli wektory są współliniowe, to można je ułożyć na jednej prostej i nasz równoległobok również „składa się” w jedną prostą. Obszar taki, jak mówią matematycy, zdegenerowany równoległobok jest równy zero. To samo wynika ze wzoru - sinus zera lub 180 stopni jest równy zeru, co oznacza, że pole wynosi zero
Zatem jeśli , to ![]() I
I ![]() . Należy pamiętać, że sam iloczyn wektorowy jest równy wektorowi zerowemu, ale w praktyce jest to często zaniedbywane i pisze się, że jest również równy zero.
. Należy pamiętać, że sam iloczyn wektorowy jest równy wektorowi zerowemu, ale w praktyce jest to często zaniedbywane i pisze się, że jest również równy zero.
Szczególnym przypadkiem jest iloczyn wektora z samym sobą:
Za pomocą iloczynu wektorowego można sprawdzić kolinearność wektorów trójwymiarowych, będziemy także analizować m.in. ten problem.
Aby rozwiązać praktyczne przykłady, których możesz potrzebować tablica trygonometryczna znaleźć z niego wartości sinusów.
No to rozpalmy ogień:
Przykład 1
a) Znajdź długość iloczynu wektorów wektorów jeśli ![]()
b) Znajdź obszar równoległoboku zbudowanego na wektorach, jeśli ![]()
Rozwiązanie: Nie, to nie jest literówka, celowo ustaliłem, że początkowe dane w klauzulach są takie same. Ponieważ projekt rozwiązań będzie inny!
a) Zgodnie z warunkiem musisz znaleźć długość wektor (iloczyn krzyżowy). Zgodnie z odpowiednim wzorem:
Odpowiedź:
Jeśli zapytano Cię o długość, w odpowiedzi podajemy wymiar - jednostki.
b) Zgodnie z warunkiem musisz znaleźć kwadrat równoległobok zbudowany na wektorach. Pole tego równoległoboku jest liczbowo równe długości iloczynu wektorowego:
Odpowiedź:
Należy pamiętać, że odpowiedź w ogóle nie mówi o produkcie wektorowym; o to nas pytano obszar figury odpowiednio wymiar jest jednostkami kwadratowymi.
Zawsze sprawdzamy, CO musimy znaleźć w zależności od warunku, i na tej podstawie formułujemy jasne odpowiedź. Może się to wydawać dosłownością, ale wśród nauczycieli jest wielu literalistów i istnieje duże prawdopodobieństwo, że zadanie zostanie zwrócone do sprawdzenia. Choć nie jest to szczególnie naciągana sprzeczka – jeśli odpowiedź jest błędna, to można odnieść wrażenie, że dana osoba nie rozumie prostych rzeczy i/lub nie zrozumiała istoty zadania. Tę kwestię należy zawsze mieć pod kontrolą przy rozwiązywaniu wszelkich problemów z matematyki wyższej, a także z innych przedmiotów.
Gdzie podziała się wielka litera „en”? W zasadzie można było to dodatkowo podpiąć do rozwiązania, jednak w celu skrócenia wpisu tego nie zrobiłem. Mam nadzieję, że wszyscy to rozumieją i jest to oznaczenie tego samego.
Popularny przykład rozwiązania typu „zrób to sam”:
Przykład 2
Znajdź obszar trójkąta zbudowanego na wektorach jeśli ![]()
Wzór na znalezienie pola trójkąta poprzez iloczyn wektorowy podano w komentarzach do definicji. Rozwiązanie i odpowiedź znajdują się na końcu lekcji.
W praktyce zadanie jest naprawdę bardzo częste, trójkąty generalnie mogą cię dręczyć.
Aby rozwiązać inne problemy, będziemy potrzebować:
Własności iloczynu wektorowego wektorów
Rozważaliśmy już niektóre właściwości produktu wektorowego, jednak uwzględnię je na tej liście.
W przypadku dowolnych wektorów i dowolnej liczby prawdziwe są następujące właściwości:
1) W innych źródłach informacji ta pozycja zwykle nie jest wyróżniona we właściwościach, ale jest bardzo ważna z praktycznego punktu widzenia. Niech tak zostanie.
2) ![]() – nieruchomość jest również omawiana powyżej, czasami jest nazywana antykomutacyjność. Innymi słowy, kolejność wektorów ma znaczenie.
– nieruchomość jest również omawiana powyżej, czasami jest nazywana antykomutacyjność. Innymi słowy, kolejność wektorów ma znaczenie.
3) – asocjacyjne lub asocjacyjny prawa dotyczące produktów wektorowych. Stałe można łatwo przenosić poza iloczyn wektorowy. Właściwie, co powinni tam robić?
4) – dystrybucja lub dystrybucyjny prawa dotyczące produktów wektorowych. Nie ma też problemów z otwieraniem zamków.
Aby to zademonstrować, spójrzmy na krótki przykład:
Przykład 3
Znajdź jeśli ![]()
Rozwiązanie: Warunek ponownie wymaga znalezienia długości iloczynu wektorowego. Pomalujmy naszą miniaturę: 
(1) Zgodnie z prawami asocjacji stałe są poza zakresem iloczynu wektorowego.
(2) Przesuwamy stałą poza moduł, a moduł „zjada” znak minus. Długość nie może być ujemna.
(3) Reszta jest jasna.
Odpowiedź: ![]()
Czas dołożyć drewna do ognia:
Przykład 4
Oblicz pole trójkąta zbudowanego na wektorach, jeśli ![]()
Rozwiązanie: Znajdź obszar trójkąta za pomocą wzoru ![]() . Problem polega na tym, że wektory „tse” i „de” są same w sobie przedstawiane jako sumy wektorów. Algorytm tutaj jest standardowy i nieco przypomina przykłady nr 3 i 4 z lekcji Iloczyn skalarny wektorów. Dla przejrzystości rozwiązanie podzielimy na trzy etapy:
. Problem polega na tym, że wektory „tse” i „de” są same w sobie przedstawiane jako sumy wektorów. Algorytm tutaj jest standardowy i nieco przypomina przykłady nr 3 i 4 z lekcji Iloczyn skalarny wektorów. Dla przejrzystości rozwiązanie podzielimy na trzy etapy:
1) W pierwszym kroku wyrażamy iloczyn wektorowy poprzez iloczyn wektorowy, w rzeczywistości wyrażmy wektor za pomocą wektora. Nie ma jeszcze słowa na temat długości!

(1) Zastąp wyrażenia wektorów.
(2) Korzystając z praw rozdzielności, otwieramy nawiasy zgodnie z zasadą mnożenia wielomianów.
(3) Używając praw asocjacji, przenosimy wszystkie stałe poza iloczyny wektorowe. Przy odrobinie doświadczenia kroki 2 i 3 można wykonać jednocześnie.
(4) Pierwszy i ostatni wyraz są równe zeru (wektor zerowy) ze względu na własność nice. W drugim członie korzystamy z własności antyprzemienności iloczynu wektorowego:
(5) Przedstawiamy podobne terminy.
W rezultacie wektor okazał się wyrażony poprzez wektor, co należało osiągnąć: ![]()
2) W drugim kroku znajdujemy potrzebną długość iloczynu wektorowego. Ta akcja jest podobna do przykładu 3: 
3) Znajdź obszar wymaganego trójkąta: ![]()
Etapy 2-3 rozwiązania można było zapisać w jednym wierszu.
Odpowiedź:
Rozważany problem jest dość powszechny w testach, oto przykład samodzielnego rozwiązania:
Przykład 5
Znajdź jeśli
Krótkie rozwiązanie i odpowiedź na końcu lekcji. Zobaczmy, jak uważny byłeś, studiując poprzednie przykłady ;-)
Iloczyn krzyżowy wektorów we współrzędnych
, określone w bazie ortonormalnej, wyrażone wzorem:
Wzór jest naprawdę prosty: w górnym wierszu wyznacznika zapisujemy wektory współrzędnych, w drugim i trzecim wierszu „ustawiamy” współrzędne wektorów i umieszczamy w ścisłym porządku– najpierw współrzędne wektora „ve”, następnie współrzędne wektora „podwójnego ve”. Jeśli zachodzi potrzeba pomnożenia wektorów w innej kolejności, należy zamienić wiersze: 
Przykład 10
Sprawdź, czy następujące wektory przestrzenne są współliniowe:
A)
B) ![]()
Rozwiązanie: Sprawdzenie opiera się na jednym ze stwierdzeń z tej lekcji: jeśli wektory są współliniowe, to ich iloczyn wektorowy jest równy zeru (wektor zerowy): ![]() .
.
a) Znajdź iloczyn wektorowy: 
Zatem wektory nie są współliniowe.
b) Znajdź iloczyn wektorowy: 
Odpowiedź: a) nie współliniowy, b)
Być może tutaj znajdują się wszystkie podstawowe informacje na temat iloczynu wektorów wektorów.
Ta sekcja nie będzie zbyt obszerna, ponieważ istnieje niewiele problemów, gdy używany jest mieszany iloczyn wektorów. W rzeczywistości wszystko będzie zależeć od definicji, znaczenia geometrycznego i kilku działających wzorów.
Iloczyn mieszany wektorów to iloczyn trzech wektorów:
Ustawili się więc w kolejce jak pociąg i nie mogą się doczekać, aż zostaną zidentyfikowani.
Na początek jeszcze raz definicja i obraz:
Definicja: Praca mieszana niewspółpłaszczyznowe wektory, podjęte w tej kolejności, zwany objętość równoległościenna, zbudowane na tych wektorach, oznaczone znakiem „+”, jeśli podstawa jest prawidłowa, oraz znakiem „–”, jeśli podstawa jest pozostawiona.
Zróbmy rysunek. Linie niewidoczne dla nas rysujemy liniami przerywanymi: 
Przejdźmy do definicji:
2) Pobierane są wektory w określonej kolejności, czyli przegrupowanie wektorów w iloczynie, jak można się domyślić, nie następuje bez konsekwencji.
3) Zanim skomentuję znaczenie geometryczne, zwrócę uwagę na oczywisty fakt: mieszany iloczyn wektorów to LICZBA: . W literaturze edukacyjnej projekt może być nieco inny, ja jestem przyzwyczajony do oznaczania produktu mieszanego przez , a wynik obliczeń literą „pe”.
A-przeorat produkt mieszany to objętość równoległościanu, zbudowane na wektorach (figura jest rysowana za pomocą czerwonych wektorów i czarnych linii). Oznacza to, że liczba jest równa objętości danego równoległościanu.
Notatka : Rysunek ma charakter schematyczny.
4) Nie martwmy się już o koncepcję orientacji podstawy i przestrzeni. Znaczenie ostatniej części jest takie, że do objętości można dodać znak minus. Krótko mówiąc, produkt mieszany może być negatywny: .
Bezpośrednio z definicji wynika wzór na obliczenie objętości równoległościanu zbudowanego na wektorach.
Definicja. Iloczyn wektorowy wektora a i wektora b jest wektorem oznaczonym symbolem [α, b] (lub l x b), takim, że 1) długość wektora [a, b] jest równa (p, gdzie y jest kąt między wektorami a i b (ryc. 31), 2) wektor [a, b) jest prostopadły do wektorów a i b, tj. prostopadle do płaszczyzny tych wektorów; 3) wektor [a, b] jest skierowany w taki sposób, że od końca tego wektora najkrótszy zwrot od a do b następuje w kierunku przeciwnym do ruchu wskazówek zegara (rys. 32). Ryż. 32 Rys.31 Innymi słowy, wektory a, b oraz [a, b) tworzą prawoskrętną trójkę wektorów, tj. znajduje się jak kciuk, palec wskazujący i środkowy prawej ręki. Jeżeli wektory a i b są współliniowe, założymy, że [a, b] = 0. Z definicji długość iloczynu wektorowego jest liczbowo równa polu Sa równoległoboku (rys. 33), zbudowanego na pomnożonej wektory a i b jako boki: 6.1 . Własności iloczynu wektorowego 1. Iloczyn wektorowy jest równy wektorowi zerowemu wtedy i tylko wtedy, gdy co najmniej jeden z pomnożonych wektorów jest zerem lub gdy wektory te są współliniowe (jeśli wektory a i b są współliniowe, to kąt między nimi wynosi albo 0, albo 7r). Można to łatwo wywnioskować z faktu, że jeśli uznamy, że wektor zerowy jest współliniowy z dowolnym wektorem, to warunek kolinearności wektorów a i b można wyrazić w następujący sposób: 2. Iloczyn wektorowy jest antyprzemienny, tj. zawsze . W rzeczywistości wektory (a, b) mają tę samą długość i są współliniowe. Kierunki tych wektorów są przeciwne, ponieważ od końca wektora [a, b] najkrótszy zwrot od a do b będzie następował w kierunku przeciwnym do ruchu wskazówek zegara, a od końca wektora [b, a] – zgodnie z ruchem wskazówek zegara (ryc. 34). 3. Iloczyn wektorowy ma właściwość rozdzielczą w odniesieniu do dodawania 4. Czynnik liczbowy A można wyjąć ze znaku iloczynu wektorowego 6.2. Iloczyn wektorowy wektorów określonych przez współrzędne Niech wektory aib zostaną określone w bazie poprzez ich współrzędne. Korzystając z własności rozkładu iloczynu wektorowego, znajdujemy iloczyn wektorowy wektorów podanych przez współrzędne. Praca mieszana. Zapiszmy iloczyny wektorowe wektorów jednostkowych współrzędnych (rys. 35): Zatem dla iloczynu wektorów wektorów a i b ze wzoru (3) otrzymujemy następujące wyrażenie Wzór (4) można zapisać symbolicznie, łatwa do zapamiętania postać, jeśli zastosujemy wyznacznik trzeciego rzędu: Rozciągając ten wyznacznik na elementy pierwszego rzędu otrzymujemy (4). Przykłady. 1. Znajdź obszar równoległoboku zbudowanego na wektorach.Wymagany obszar.Dlatego znajdujemy = skąd 2. Znajdź obszar trójkąta (ryc. 36). Oczywiste jest, że pole b"d trójkąta OAO jest równe połowie pola S równoległoboku O AC B. Obliczając iloczyn wektorowy (a, b| wektorów a = OA i b = ob, otrzymujemy Stąd Uwaga Iloczyn wektorowy nie jest łączny, czyli równość ( (a, b),c) = [a, |b,c)) nie jest prawdziwa w ogólnym przypadku.Na przykład dla a = ss j mamy § 7. Iloczyn mieszany wektorów Mamy trzy wektory a, b i c. Pomnóż wektory a i 1> wektorowo. W rezultacie otrzymamy wektor [a, 1>]. Pomnóż go skalarnie przez wektor c: ( k b), c).Liczbę ([a, b], e) nazywamy iloczynem mieszanym wektorów a, b. c i oznaczamy symbolem (a, 1), e), wektory a, b i c nazywane są w tym przypadku współpłaszczyznowymi), to iloczyn mieszany ([a, b], c) = 0. Wynika to z faktu, że wektor [a, b| jest prostopadły do płaszczyzny, w której znajdują się wektory a i 1 kłamstwo”, a zatem do wektora c. / Jeżeli punkty O, A, B, C nie leżą w tej samej płaszczyźnie (wektory a, b i c nie są współpłaszczyznowe), to skonstruujemy równoległościan na krawędziach OA, OB i system operacyjny (ryc. 38a). Z definicji iloczynu wektorowego mamy (a,b) = So c, gdzie So jest polem równoległoboku OADB, a c jest wektorem jednostkowym prostopadłym do wektorów aib i takim, że potrójne a , b, c jest praworęczne, tj. wektory a, b i c znajdują się odpowiednio jako kciuk, palec wskazujący i środkowy prawej ręki (ryc. 38 b). Mnożąc obie strony ostatniej równości po prawej stronie skalarnie przez wektor c, otrzymujemy iloczyn wektorowy wektorów podanych przez współrzędne. Praca mieszana. Liczba pc c jest równa wysokości h zbudowanego równoległościanu, branej ze znakiem „+”, jeśli kąt między wektorami c i c jest ostry (potrójne a, b, c - prawe) oraz ze znakiem „-” znak, jeśli kąt jest rozwarty (potrójny a, b, c - lewy), tak że Iloczyn mieszany wektorów a, b i c jest równy objętości V równoległościanu zbudowanego na tych wektorach jak na krawędziach, jeśli potrójne a, b, c jest prawidłowe i -V, jeśli potrójne a , b, c - lewe. Bazując na geometrycznym znaczeniu iloczynu mieszanego, możemy stwierdzić, że mnożąc te same wektory a, b i c w dowolnej innej kolejności, zawsze otrzymamy +7 lub -K. Znak producenta Rys. Odniesienie będzie zależeć tylko od tego, jaką trójkę utworzą pomnożone wektory - prawą czy lewą. Jeśli wektory a, b, c tworzą trójkę prawoskrętną, to trójki b, c, a i c, a, b również będą prawoskrętne. Jednocześnie wszystkie trzy trójki b, a, c; a, c, b i c, b, a - w lewo. Zatem (a,b, c) = (b,c, a) = (c,a,b) = -(b,a,c) = -(a,c,b) = -(c,b , A). Jeszcze raz podkreślamy, że iloczyn mieszany wektorów jest równy zeru tylko wtedy, gdy pomnożone wektory a, b, c są współpłaszczyznowe: (a, b, c są współpłaszczyznowe) 7.2. Iloczyn mieszany we współrzędnych Niech wektory a, b, c będą dane przez ich współrzędne w bazie i, j, k: a = (x\,y\,z]), b= (x2,y2>z2), c = (x3, uz, 23). Znajdźmy wyrażenie na ich iloczyn mieszany (a, b, c). Mamy iloczyn mieszany wektorów określonych przez ich współrzędne w bazie i, J, k, równy wyznacznikowi trzeciego rzędu, którego proste składają się odpowiednio ze współrzędnych pierwszego, drugiego i trzeciego z pomnożonych wektorów. Warunek konieczny i wystarczający współpłaszczyznowości wektorów a y\, Z|), b = (хъ У2.22), с = (жз, з, 23) zapiszemy w postaci У| z, ag2 y2 -2 =0. Uz Przykład. Sprawdź, czy wektory „ = (7,4,6), b = (2, 1,1), c = (19, II, 17) są współpłaszczyznowe. Rozważane wektory będą współpłaszczyznowe lub niewspółpłaszczyznowe w zależności od tego, czy wyznacznik jest równy zeru, czy nie.Rozwijając go na elementy pierwszego rzędu, otrzymujemy D = 7-6-4-15 + 6-3 = 0^ - wektory n, b, c są współpłaszczyznowe. 7.3. Iloczyn podwójny krzyżowy Iloczyn podwójnego krzyża [a, [b, c]] jest wektorem prostopadłym do wektorów a i [b, c]. Dlatego leży w płaszczyźnie wektorów b i c i można go rozwinąć na te wektory. Można wykazać, że obowiązuje wzór [a, [!>, c]] = b(a, e) - c(a, b). Ćwiczenia 1. Trzy wektory AB = c, Ж? = o i CA = b służą jako boki trójkąta. Wyraź za pomocą a, b i c wektory pokrywające się ze środkowymi AM, DN, CP trójkąta. 2. W jakim stanie wektory p i q muszą być połączone, aby wektor p + q podzielił kąt między nimi na pół? Zakłada się, że wszystkie trzy wektory mają wspólne pochodzenie. 3. Oblicz długość przekątnych równoległoboku zbudowanego na wektorach a = 5p + 2q i b = p - 3q, jeśli wiadomo, że |p| = 2v/2, |q| = 3H-(p7ci) = f. 4. Oznaczając przez a i b boki rombu odchodzące od wspólnego wierzchołka, udowodnij, że przekątne rombu są wzajemnie prostopadłe. 5. Oblicz iloczyn skalarny wektorów a = 4i + 7j + 3k oraz b = 31 - 5j + k. 6. Znajdź wersor a0 równoległy do wektora a = (6, 7, -6). 7. Znajdź rzut wektora a = l+ j- kHa wektor b = 21 - j - 3k. 8. Znajdź cosinus kąta między wektorami IS „w, jeśli A(-4,0,4), B(-1,6,7), C(1,10,9). 9. Znajdź wektor jednostkowy p°, który jest jednocześnie prostopadły do wektora a = (3, 6, 8) i osi Ox. 10. Oblicz sinus kąta między przekątnymi równoległoboku zbudowanego na wektorach a = 2i+J-k, b=i-3j + k jak na bokach. Oblicz wysokość h równoległościanu zbudowanego na wektorach a = 31 + 2j - 5k, b = i- j + 4knc = i-3j + k, jeśli za podstawę przyjmiemy równoległobok zbudowany na wektorach a i I. Odpowiedzi
Oczywiście w przypadku iloczynu wektorowego znaczenie ma ponadto kolejność wektorów
Również bezpośrednio z definicji wynika, że dla dowolnego współczynnika skalarnego k (liczby) prawdziwe jest:

Iloczyn krzyżowy wektorów współliniowych jest równy wektorowi zerowemu. Co więcej, iloczyn krzyżowy dwóch wektorów wynosi zero wtedy i tylko wtedy, gdy są one współliniowe. (W przypadku, gdy jeden z nich jest wektorem zerowym, należy pamiętać, że wektor zerowy jest z definicji współliniowy z dowolnym wektorem).

Produkt wektorowy ma własność rozdzielcza, to jest

Wyrażanie iloczynu wektorowego poprzez współrzędne wektorów.
Niech zostaną dane dwa wektory
(jak znaleźć współrzędne wektora na podstawie współrzędnych jego początku i końca - zobacz artykuł Iloczyn skalarny wektorów, pozycja Alternatywna definicja iloczynu skalarnego, czyli obliczanie iloczynu skalarnego dwóch wektorów określonych przez ich współrzędne.)

Dlaczego potrzebujesz produktu wektorowego?
Iloczyn krzyżowy można wykorzystać na wiele sposobów, np. jak napisano powyżej, obliczając iloczyn krzyżowy dwóch wektorów można sprawdzić, czy są one współliniowe.

Lub może być użyty jako sposób obliczenia pola równoległoboku zbudowanego z tych wektorów. Zgodnie z definicją długością powstałego wektora jest pole danego równoległoboku.
Istnieje również ogromna liczba zastosowań w elektryczności i magnetyzmie.Kalkulator produktów wektorowych online.
Aby znaleźć iloczyn skalarny dwóch wektorów za pomocą tego kalkulatora, należy wprowadzić współrzędne pierwszego wektora w pierwszej linii w kolejności, a drugiego w drugiej linii. Współrzędne wektorów można obliczyć ze współrzędnych ich początku i końca (patrz art Iloczyn skalarny wektorów, element Alternatywna definicja iloczynu skalarnego, czyli obliczanie iloczynu skalarnego dwóch wektorów podanych przez ich współrzędne.)
7.1. Definicja produktu krzyżowego
Trzy niewspółpłaszczyznowe wektory a, b i c, wzięte we wskazanej kolejności, tworzą prawoskrętną trójkę, jeśli od końca trzeciego wektora c widać, że najkrótszy zwrot od pierwszego wektora a do drugiego wektora b być w kierunku przeciwnym do ruchu wskazówek zegara, a trójka lewoskrętna, jeśli zgodnie z ruchem wskazówek zegara (patrz ryc. 16).
Iloczyn wektorowy wektora a i wektora b nazywa się wektorem c, który:
1. Prostopadle do wektorów a i b, tj. c ^ a i c ^ B ;
2. Ma długość równą liczbowo powierzchni równoległoboku zbudowanego na wektorach a iB jak po bokach (patrz rys. 17), tj.
3. Wektory a, b i c tworzą prawoskrętną trójkę.


Iloczyn krzyżowy jest oznaczony jako a x b lub [a, b]. Z definicji iloczynu wektorowego wynikają bezpośrednio następujące zależności pomiędzy wektorami jednostkowymi, J I k(patrz rys. 18):
ja x jot = k, jot x k = ja, k x ja = jot.
Udowodnijmy to na przykład ja xj = k.
1) k ^ i, k ^ J ;
2) |k |=1, ale | ja x j| = |i | |J | grzech(90°)=1;
3) wektory i, j oraz k tworzą prawą potrójną (patrz ryc. 16).
7.2. Właściwości produktu krzyżowego
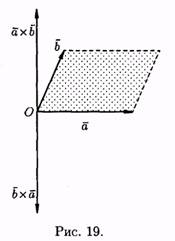
1. Podczas przestawiania czynników iloczyn wektorowy zmienia znak, tj. i xb =(b xa) (patrz rys. 19).
Wektory a xb i b xa są współliniowe, mają te same moduły (obszar równoległoboku pozostaje niezmieniony), ale są skierowane przeciwnie (potrójne a, b, a xb i a, b, b x a o przeciwnej orientacji). To jest axb = -(b xa).
2. Iloczyn wektorowy ma właściwość łączenia w odniesieniu do współczynnika skalarnego, tj. l (a xb) = (l a) x b = a x (l b).
Niech l > 0. Wektor l (a xb) jest prostopadły do wektorów a i b. Wektor ( l topór B jest również prostopadła do wektorów a i B(wektory a, l ale leżą w tej samej płaszczyźnie). Oznacza to, że wektory l(axb) i ( l topór B współliniowy. Oczywiste jest, że ich kierunki są zbieżne. Mają tę samą długość:
Dlatego l(axb)= l xb. Udowodniono to w podobny sposób dla l<0.
3. Dwa niezerowe wektory a i B są współliniowe wtedy i tylko wtedy, gdy ich iloczyn wektorowy jest równy wektorowi zerowemu, tj. a ||b<=>i xb =0.

W szczególności i *i =j *j =k *k =0 .
4. Iloczyn wektorowy ma właściwość rozkładu:
(a+b) xc = a xc + B xs.
Przyjmiemy bez dowodu.
7.3. Wyrażanie iloczynu krzyżowego we współrzędnych
Będziemy korzystać z tabeli iloczynów krzyżowych wektorów i, J ik:

jeśli kierunek najkrótszej ścieżki od pierwszego wektora do drugiego pokrywa się z kierunkiem strzałki, wówczas iloczyn jest równy trzeciemu wektorowi, jeśli się nie pokrywa, trzeci wektor jest przyjmowany ze znakiem minus.
Niech będą dane dwa wektory a =a x i +a y J+a z k oraz b = bx I+b y J+b z k. Znajdźmy iloczyn wektorowy tych wektorów, mnożąc je jako wielomiany (zgodnie z właściwościami iloczynu wektorowego):

![]()
Otrzymaną formułę można zapisać jeszcze krócej:

gdyż prawa strona równości (7.1) odpowiada rozwinięciu wyznacznika trzeciego rzędu pod względem elementów pierwszego rzędu Równość (7.2) jest łatwa do zapamiętania.
7.4. Niektóre zastosowania produktów krzyżowych
Ustalanie kolinearności wektorów

Znalezienie pola równoległoboku i trójkąta
Zgodnie z definicją iloczynu wektorów A oraz b |a xb | =|a| * |b |sing g, tj. S par = |a x b |. A zatem D S =1/2|a x b |.
Wyznaczanie momentu siły względem punktu
Niech w punkcie A zostanie przyłożona siła F = AB Odpuść sobie O- jakiś punkt w przestrzeni (patrz ryc. 20).

Z fizyki wiadomo, że moment siły F względem punktu O zwany wektorem M, który przechodzi przez punkt O I:
1) prostopadle do płaszczyzny przechodzącej przez punkty O, A, B;
2) liczbowo równy iloczynowi siły na ramię
3) tworzy prawą trójkę z wektorami OA i A B.
Dlatego M = OA x F.
Znalezienie liniowej prędkości obrotowej
Prędkość w punkt M ciała sztywnego obracającego się z prędkością kątową w wokół ustalonej osi, wyznacza się wzorem Eulera v = w xr, gdzie r = OM, gdzie O jest pewnym stałym punktem osi (patrz rys. 21).


